












Аб'яднаўшы шматгадовую інтэлектуальную рэабілітацыйную тэхналогію і клінічны вопыт з найноўшымі тэндэнцыямі рэабілітацыйнай індустрыі, Yikang распрацавала інтэлектуальную сістэму зваротнай сувязі і навучання ніжніх канечнасцяў A1-3.
ПРАДУКЦЫЯ
Рабатызаваны нахільны стол A1-3 выкарыстоўвае новую канцэпцыю рэабілітацыі, каб пераадолець недахопы традыцыйнага рэабілітацыйнага навучання.Нахільны стол дапамагае пацыентам трэніравацца пры хадзе.Імітуючы нармальную фізіялагічную хаду, гэта абсталяванне дапамагае аднавіць здольнасць пацыентаў хадзіць.
А1-3 падыходзіць для рэабілітацыі пацыентаў з захворваннямі нервовай сістэмы, звязанымі з інсультам, чэрапна-мазгавой траўмай або няпоўным пашкоджаннем спіннога мозгу.Выкарыстанне рэабілітацыйнага робата - гэта сапраўды эфектыўнае рашэнне, асабліва на ранніх этапах рэабілітацыі.

Што тычыцца рэабілітацыйнага лячэння, існуе тры ўзроўні трэніровак ніжніх канечнасцяў: трэніроўкі пасіўнага ўзаемадзеяння са сцэнай, аднабаковыя індукаваныя трэніроўкі і пераменныя інтэрактыўныя трэніроўкі.Гэта першая сістэма інтэлектуальнай зваротнай сувязі і трэніровак ніжніх канечнасцяў, якая стварае прагрэсіўны шлях трэніровак.
Аптымізацыя прадукцыйнасці руху
- Пачынаючы з клінічнай практыкі, вывучыце лепшыя метады трэніроўкі ніжніх канечнасцяў.
- Ортостатический кут
- Імітацыя руху пры хадзе
- Рэгуляваная ложак
Інтэлектуальныя тэхналагічныя інавацыі
- Аўтаматычная рэгуляванне даўжыні ног: аўтаматычна вымерайце даўжыню ног пацыента
- Скід даўжыні ног адной кнопкай: аўтаматычнае аднаўленне даўжыні ног пацыента
- Скід ложка адной кнопкай: аўтаматычнае аднаўленне ў стане гатоўнасці
Прарыў у рэабілітацыйных тэхналогіях
- Новая 3D-сцэна віртуальнага жыцця высокай выразнасці, захапляльны віртуальны вопыт
- Ацэнка рухомасці ніжніх канечнасцяў, інтэграцыя навучання і ацэнкі
- Аўтаматычны аналіз і статыстыка, аўтаматычная зводка некалькіх навучальных і ацэначных дадзеных
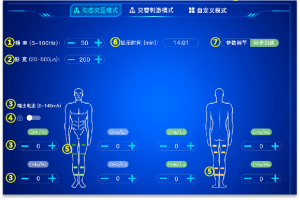
- Маторныя трэніроўкі ніжніх канечнасцяў у спалучэнні з электрастымуляцыяй паверхневых цягліц (FES)
Аб інтэлектуальнай сістэме зваротнай сувязі і навучання ніжніх канечнасцяў A1-3
1.АПТЫМІЗАЦЫЯ РУХУ
1.1ортостатическое стоячы 0-90 °
Выкарыстанне тэхналогіі нулявога зазору зводзіць да мінімуму дрыгаценне ложка падчас стаяння, забяспечваючы пацыентам больш камфортнае лячэнне.

1.2 Рэалістычная хада, кут руху тазасцегнавага сустава 0-45°
Шырокі дыяпазон рухаў суставаў ніжніх канечнасцяў можа забяспечыць больш поўны вопыт трэніровак пры хадзе, так што кожны сустаў ніжніх канечнасцяў можа практыкавацца ў большай ступені.

1.3 0-15°Ляжачы ложак
Павялічце вугал нахілу падчас трэніровак з бесперапынным крокам, каб цалкам расцягнуць мышцы, якія ўдзельнічаюць у разгінанні сцягна.

2.ІНАВАЦЫІ ІНТЭЛЕКТУАЛЬНЫХ ТЭХНАЛОГІЙ
- Аўтаматычная рэгуляванне даўжыні ног
- Аўтаматычны скід даўжыні ног
- Аўтаматычны скід ложка

3.ТЭХНАЛОГІЯ РЭАБІЛІТАЦЫІ
Віртуальны інтэрактыўны трэнінг:Новы 3D-рухавік выкарыстоўваецца для стварэння сцэн практыкаванняў з высокай сімуляцыяй, утвараючы ўзаемасувязь паміж трэніроўкамі і рэальным жыццём.

Ацэнка дыяпазону рухаў:A1-3 з'яўляецца першым, хто ўвёў ацэнку ПЗУ ніжніх канечнасцяў у інтэлектуальных серыях ніжніх канечнасцяў.Гэта дазваляе нам у любы час назіраць за развіццём здольнасці пацыентаў рухацца ніжнімі канечнасцямі.Кут руху ніжніх канечнасцяў фіксуецца прыборам.Запісы сінхранізуюцца з наладамі навучання

Аўтаматычны статыстычны аналіз:Аўтаматычна абагульняйце даныя навучання і ацэнкі навучання пацыента ў розныя перыяды часу і візуальна адлюстроўвайце функцыянальнае аднаўленне пацыента.

Інтуітыўна зразумелыя інструкцыі ўзаемадзеяння:Моцная інтэрактыўная падказка, кантроль часу практыкаванняў
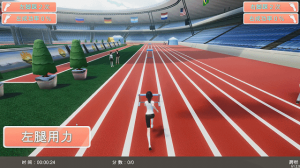
Разнастайныя формы навучання:Пасіўнае практыкаванне, мадэляванне сцэнарыя;Левая/правая нага, трэніроўка адной нагі;Адначасовае чаргаванне левай і правай ног
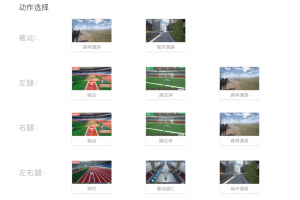
Жыццёва-арыентаванае навучанне:На аснове паўсядзённых жыццёвых сцэнарыяў;Устанавіце сцэны, цесна звязаныя з рухам ніжніх канечнасцяў

Ацэнка ROM ніжніх канечнасцяў
4.ЭРГАНАМІЧНЫ ДЫЗАЙН
Пад'ёмная нажная педаль: Новая біянічная структура лодыжкі і ступні дазваляе больш шырокі дыяпазон рухаў лодыжкі і ступні, дапамагаючы ў далейшым аднаўленні функцыі шчыкалаткі і ступні

Рухомы падлакотнік: Дугападобная канструкцыя рукі машыны падыходзіць да рукі чалавека і можа стабілізаваць становішча рукі падчас трэніроўкі.Ён падтрымлівае і стабілізуе выправу верхніх канечнасцяў.

Рэгуляваная адлегласць паміж нагамі: Адлегласць паміж нагамі можна рэгуляваць у залежнасці ад памеру цела пацыента, каб пацыенты трэніраваліся ў зручным становішчы.

Рэгуляваная фіксацыя ног: Фіксацыю ног можна змяніць у залежнасці ад даўжыні ног пацыента, каб адаптавацца да формы цела пацыента.

Абцякальны дызайн ложкакаб адпавядаць крывой чалавечага цела, зніжаючы ціск

5.EЭксклюзіўная функцыя:спалучэнне з павярхоўным миоэлектричеством

Асноўныя характарыстыкі робата для рэабілітацыі ніжніх канечнасцяў A1-3:
1. Запатэнтаваная тэхналогія нахілу спіны дапамагае разгінаць сцягна, набліжае фізіялагічную хаду, душыць анамальныя рэфлекторныя патэрны
2. Больш высокая эфектыўнасць абслугоўвання: эксклюзіўная аўтаматычная рэгуляванне даўжыні ног і функцыі скіду адной клавішай
3. Візуалізаваны навучальны працэс: эксклюзіўная функцыя ацэнкі сумеснай дзейнасці ў рэжыме рэальнага часу
4. Бяспечны і зручны: эрганамічны дызайн падлакотніка для прадухілення вывіху пляча
5. Рэгуляваная адлегласць паміж нагамі і лодыжкамі для персаналізаваных налад навучання
6. Спалучэнне з павярхоўнай электраміёграфія: спалучэнне хады і электрастымуляцыі для аднаўлення функцыі хады





