













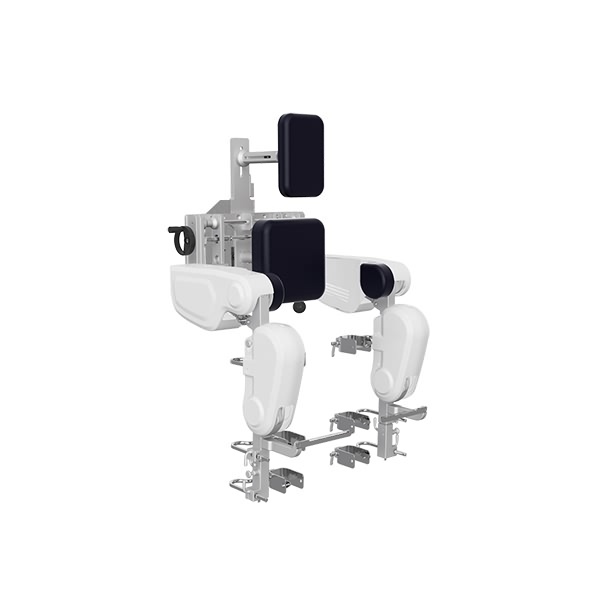

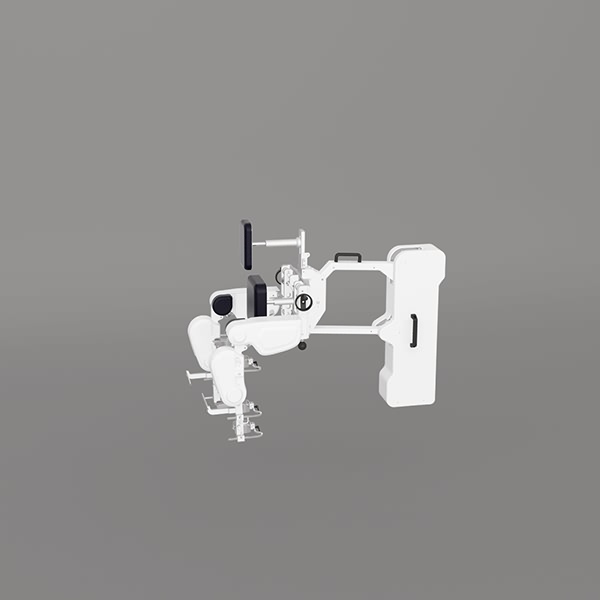
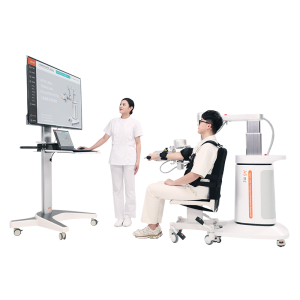
Què és una robòtica d'entrenament de la marxa?
La robòtica d'entrenament i avaluació de la marxa ésun dispositiu per a l'entrenament de rehabilitació per a la disfunció de la marxa.Adopta un sistema de control informàtic i un dispositiu de correcció de la marxa per permetre l'entrenament de la marxa.Ferels pacients enforteixen la seva memòria de la marxa normal amb l'entrenament de la marxa repetida i de trajectòria fixa sota la posició estèreo recta.Amb el robot de marxa, els pacients podenrestablir les seves àrees de funció de caminar al cervell, establiu el mode de caminada correcte.A més, el robot amb eficàciaexercicis de caminar relacionats amb els músculs i les articulacions, que és ideal per a la rehabilitació.
La robòtica d'entrenament de la marxa és adequada per a la rehabilitació de la discapacitat per caminar causada per danys al sistema nerviós com ara un ictus (infart cerebral, hemorràgia cerebral).Com més aviat el pacient comenci a entrenar la marxa, més curta serà la durada de la rehabilitació.
Quin és l'efecte terapèutic de la robòtica d'entrenament de la marxa?
1, reprendre el mode de marxa normal durant l'entrenament primerenc;
2, inhibir i alleujar eficaçment els espasmes i millorar la mobilitat articular;
3, suport de pes dinàmic, millora l'entrada propioceptiva, manté i millora la força muscular.
Quines característiques té el robot d'entrenament de la marxa?
1, Disseny segons el cicle normal de la marxa;
2, servomotors importats: controleu amb precisió l'angle de moviment conjunt i la velocitat de caminada;
3, modes d'entrenament actiu i passiu;
4, la força de guia és suau i ajustable;
5, Realitzeu la correcció de la marxa hàbits anormals de la marxa mitjançant la compensació de la marxa;
6, detecció i protecció d'espasmes;
7, el sistema de suspensió té dos modes de suport: Suport estàtic: adequat per a l'aixecament i l'aterratge vertical, facilitant la transferència dels pacients de la cadira de rodes a l'estat de peu.Suport dinàmic: ajust dinàmic del centre de gravetat del cos en el cicle de la marxa.
8, cinta de córrer patent- La velocitat de la cinta de córrer i el corrector de la marxa es sincronitzen automàticament;La velocitat més baixa és de 0,1 km/h, adequat per a la formació de rehabilitació primerenca;La cinta de córrer pot funcionar com un coixí queprotegeix els genolls i els lligaments dels pacients.
9, formació de retroalimentació d'escena virtual- potenciar l'entusiasme de l'entrenament, reduir el tractament avorrit, ipromoure el procés de recuperació dels pacients.
10, programari: establir una base de dades de pacients per registrar la informació del tractament i els plans de tractament;El pla de tractament és ajustable per aconseguir un control precís i una recuperació precisa;Mostra la corba de resistència de les cames del pacient en temps real;Monitorització en temps reald'entrenament actiu i passiu de cames, controlant la situació de força activa del pacient.
Durant les últimes dècades, hem estat desenvolupant molts equips de rehabilitació, inclososteràpia físicairobots de rehabilitació.Trobeu el que us sigui més útil i no dubteu a fer-hoenviar un missatge de contacte.
-
Taula Bobath recolzada per LINAK Motor
-

Robòtica de rehabilitació de mans A5
-

Aparell d'entrenament actiu de l'articulació del genoll
-

Robot de rehabilitació intel·ligent de l'extremitat inferior pediàtrica A1...
-

Taula de teràpia manual multifuncional per a nens
-
ROBOT D'ENTRENAMENT I AVALUACIÓ DE L'EXTREMITAT SUPERIOR A6M2