












Combinant anys de tecnologia de rehabilitació intel·ligent i experiència clínica amb l'última tendència de la indústria de la rehabilitació, Yikang va desenvolupar el sistema intel·ligent de retroalimentació i formació de les extremitats inferiors A1-3.
INTRODUCCIÓ DEL PRODUCTE
La taula robòtica inclinable A1-3 utilitza un nou concepte de rehabilitació per superar les deficiències de l'entrenament tradicional de rehabilitació.La taula inclinable ajuda els pacients a fer entrenament de caminar.En simular la marxa fisiològica normal, aquest equip ajuda a restaurar la capacitat de caminar dels pacients.
A1-3 és adequat per a la rehabilitació de pacients que pateixen trastorns del sistema nerviós relacionats amb un ictus o una lesió cerebral traumàtica o lesions incompletes de la medul·la espinal.És realment una solució eficaç per utilitzar el robot de rehabilitació especialment en les primeres etapes de la rehabilitació.

Pel que fa al tractament de rehabilitació, hi ha tres nivells d'entrenament de les extremitats inferiors: entrenament passiu d'interacció amb escena, entrenament induït unilateral i entrenament interactiu alternatiu.És el primer sistema intel·ligent de retroalimentació i entrenament de les extremitats inferiors per construir un camí d'entrenament progressiu.
Optimització del rendiment del moviment
- A partir de la pràctica clínica, explorar millors mètodes d'entrenament de les extremitats inferiors.
- Angle ortostàtic
- Simulació del moviment de caminar
- Llit ajustable
Innovació Tecnològica Intel·ligent
- Ajust automàtic de la longitud de la cama: mesura automàticament la longitud de la cama del pacient
- Restabliment de la longitud de la cama amb un botó: restaura automàticament la longitud de la cama del pacient
- Restabliment del llit amb un botó: es restableix automàticament a l'estat de preparació
Avenç tecnològic de rehabilitació
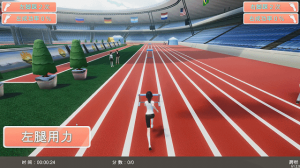
- Nova escena de vida virtual en 3D d'alta definició, experiència virtual immersiva
- Avaluació de la mobilitat de les extremitats inferiors, Integració de la formació i avaluació
- Anàlisi i estadístiques automàtiques, resum automàtic de múltiples dades de formació i avaluació
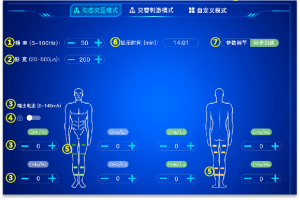
- Entrenament motor de les extremitats inferiors combinat amb estimulació elèctrica muscular superficial (FES)
Sobre el sistema intel·ligent de retroalimentació i entrenament de les extremitats inferiors A1-3
1.OPTIMITZACIÓ DEL MOVIMENT
1.1dempeus ortostàtica 0-90°
L'ús de la tecnologia d'eliminació zero minimitza la sacsejada del llit durant la parada, donant als pacients una experiència de tractament més còmoda.

1.2 Moviment de caminar realista, angle de moviment de l'articulació del maluc 0-45 °
Un ampli rang de moviment de les articulacions de les extremitats inferiors pot proporcionar una experiència d'entrenament de caminar més completa, de manera que cada articulació de les extremitats inferiors pugui exercir-se en una extensió més àmplia.

1,3 0-15°Llit reclinable
Augmenteu l'angle de reclinació durant l'entrenament continu per estirar completament els músculs implicats en l'extensió del maluc.

2.INNOVACIÓ EN TECNOLOGIA INTEL·LIGENT
- Ajust automàtic de la longitud de la cama
- Restabliment automàtic de la longitud de la cama
- Reinici automàtic del llit

3.TECNOLOGIA DE REHABILITACIÓ
Formació interactiva virtual:El nou motor 3D s'utilitza per crear escenes d'exercicis d'alta simulació, formant la interconnexió entre l'entrenament i la vida real.

Avaluació del rang de moviment:A1-3 és el primer a introduir l'avaluació de la ROM de les extremitats inferiors en sèries intel·ligents d'extremitats inferiors.Ens permet observar el progrés de la capacitat de moviment de les extremitats inferiors dels pacients en qualsevol moment.El dispositiu registra l'angle de moviment de les extremitats inferiors.Els registres es sincronitzen amb la configuració d'entrenament

Anàlisis estadístic automàtic:Resumeix automàticament les dades d'entrenament i avaluació de l'entrenament del pacient en diferents períodes de temps i mostra visualment la recuperació funcional del pacient.

Instruccions d'interacció intuïtives:Forta indicació interactiva, control del temps d'exercici
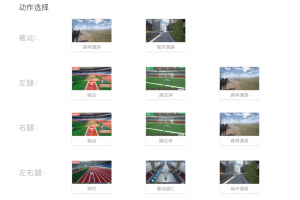
Formes de formació diversificades:Exercici passiu, simulació d'escenaris;Cama esquerra/dreta, entrenament d'una cama;Entrenament alternatiu simultani de cama esquerra i dreta
Formació orientada a la vida:Basat en escenaris de la vida quotidiana;Establiu escenes molt associades amb el moviment de les extremitats inferiors

Avaluació de la ROM de l'extremitat inferior
4.DISSENY ERGONÒMIC
Pedal aixecant: La nova estructura biònica turmell-peu permet una gamma més àmplia de moviment turmell-peu, ajudant a la recuperació addicional de la funció de turmell i peu.

Reposabraços mòbil: El disseny en forma d'arc del braç de la màquina s'adapta al braç del cos humà i pot estabilitzar la posició del braç durant l'entrenament.Manté i estabilitza la postura de les extremitats superiors.

Espaiat de cames ajustable: L'espai de les cames es pot ajustar segons la mida del cos del pacient per assegurar-se que els pacients s'entrenen en una posició còmoda.

Fixació de cames ajustable: La fixació de la cama es pot canviar segons la longitud de la cama del pacient per adaptar-se a la forma del cos del pacient.

Disseny de llit racionalitzatper adaptar-se a la corba del cos humà, reduint la pressió

5.EFUNCIÓ EXCLUSIVA:combinació amb mioelectricitat superficial

Aspectes destacats del robot de rehabilitació de les extremitats inferiors A1-3:
1. Tecnologia patentada d'inclinació cap a l'esquena, ajuda a l'extensió del maluc, més a prop de la marxa fisiològica, suprimeix els patrons reflexos anormals
2. Major eficàcia del servei: ajust automàtic exclusiu de la longitud de la cama i funcions de reinici d'una sola tecla
3. Procés d'entrenament visualitzat: funció de visualització en temps real d'avaluació de l'activitat conjunta exclusiva
4. Segur i còmode: disseny ergonòmic del reposabraços per evitar la luxació de l'espatlla
5. Espaiat ajustable entre cames i turmells per a ajustos d'entrenament personalitzats
6. Combinació amb electromiografia superficial: combinant la marxa i l'estimulació elèctrica per restaurar la funció de la marxa





