







Sobre el robot de rehabilitació d'extremitats superiors A6-2S
Basada en tecnologia informàtica, la robòtica de rehabilitació i avaluació del braç pot simular el moviment de les extremitats superiors en temps real segons la teoria de la medicina de rehabilitació.Permet entrenar en 6 graus principals de llibertat en l'espai tridimensional, realitzant el control precís en l'espai 3D.Es pot fer una avaluació precisa de les sis direccions de moviment (adducció i abducció de l'espatlla, flexió de l'espatlla, extorsió i intorsió de l'articulació de l'espatlla, flexió del colze, pronació i supinació de l'avantbraç i flexió i flexió dorsal del canell) de les tres articulacions de moviment principals de l'extremitat superior. (espatlla, colze i canell).Pot analitzar les dades d'avaluació en temps real per ajudar els terapeutes a fer plans de tractament, cosa que millora l'eficiència clínica.El sistema té cinc modes d'entrenament que inclouen entrenament passiu, entrenament actiu-passiu i entrenament actiu.Es pot utilitzar durant tot el cicle de rehabilitació.La funció d'entrenament s'integra amb diversos jocs interactius virtuals situacionals orientats a tasques, oferint als pacients una formació personalitzada diversa, millorant les iniciatives i la dependència dels pacients i accelerant el progrés de la rehabilitació dels pacients.Les dades d'avaluació i formació s'enregistraran, es guardaran, s'analitzaran i es podran compartir en temps real quan el sistema estigui connectat a Internet.

A6 s'aplica a pacients amb disfunció de les extremitats superiors o funció limitada a causa d'una malaltia del sistema nerviós central, nervis perifèrics, medul·la espinal, músculs o ossos.El producte admet exercicis específics, augmenta la força dels músculs, augmenta el rang de moviment de les articulacions i millora la funció motora.
–
5 Modes d'entrenament del robot de rehabilitació d'extremitats superiors A6-2S
Mode d'entrenament passiu
Mitjançant el mode de "programació de la trajectòria", els terapeutes poden establir paràmetres com ara el nom de l'articulació dirigida, el rang de moviment i la velocitat de moviment de l'articulació per oferir un entrenament de trajectòria passiva personalitzat i dirigit als pacients.A través dels interessants jocs situacionals, l'entrenament passiu serà més agradable.
Mode d'entrenament actiu-passiu
El sistema ajuda els pacients a completar l'entrenament mitjançant l'ajust sobre la "força guia".Com més gran sigui la força de guia, més gran serà el grau auxiliar del sistema;com més petita sigui la força guia, més alt serà el grau de participació activa del pacient.Els terapeutes poden establir la força de guia segons el grau de força muscular del pacient per estimular la força muscular residual del pacient al màxim durant el procés d'entrenament del joc.
Mode d'entrenament actiu
Els pacients poden conduir lliurement el braç mecànic per moure's en qualsevol direcció en l'espai tridimensional.Els terapeutes poden fer una selecció personalitzada d'articulacions d'entrenament segons les necessitats del pacient i seleccionar jocs interactius en conseqüència per a l'entrenament d'articulacions individuals o múltiples.D'aquesta manera, es pot millorar la iniciativa de formació dels pacients i es pot accelerar el progrés de la rehabilitació.
Mode d'entrenament amb recepta
Aquesta modalitat s'inclina més a l'entrenament de la vida diària i la teràpia ocupacional, que inclou diverses activitats de la vida diària, com ara pentinar-se, menjar, etc. Els terapeutes poden triar les receptes d'entrenament en conseqüència per ajudar el pacient a començar ràpidament l'entrenament.Tots els ajustaments es realitzen en funció de la situació del pacient, garantint que el pacient sigui capaç d'adaptar-se al màxim a les activitats de la vida diària.
Mode d'aprenentatge de la trajectòria
A6 és un robot de rehabilitació de les extremitats superiors 3D que té funció de memòria AI.El sistema està equipat amb una funció d'emmagatzematge de memòria al núvol, que pot aprendre i registrar la trajectòria de moviment específica del terapeuta i restaurar-la completament. Les trajectòries de moviment dirigides i personalitzades estan dissenyades per a diferents pacients en conseqüència.D'aquesta manera, es pot realitzar un entrenament concentrat i repetitiu de manera que es pugui millorar la funció de moviment dels pacients.
–
Vista de dades
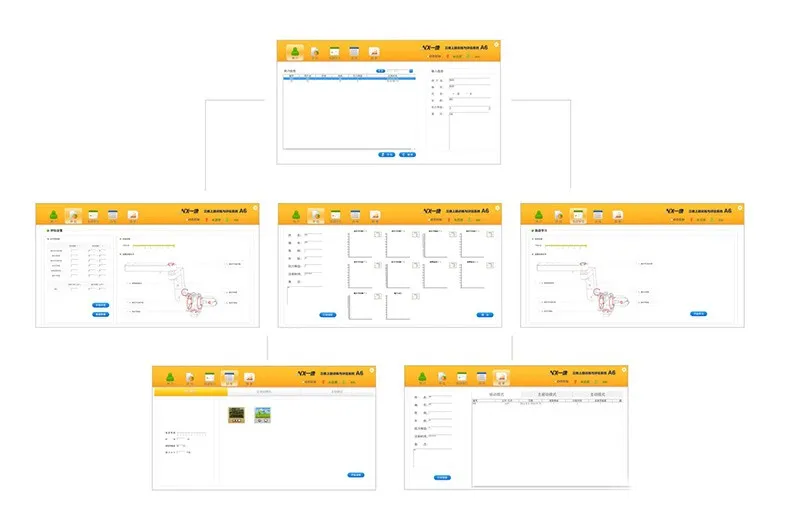
Usuari: Inici de sessió del pacient, registre, cerca d'informació bàsica, modificació i supressió.
Avaluació: Avaluació en ROM, arxiu i visualització de dades, així com impressió, i registre de trajectòria i velocitat predeterminada.
Informeu: visualitza els registres de l'historial d'informació de formació del pacient.
–
Característiques clau
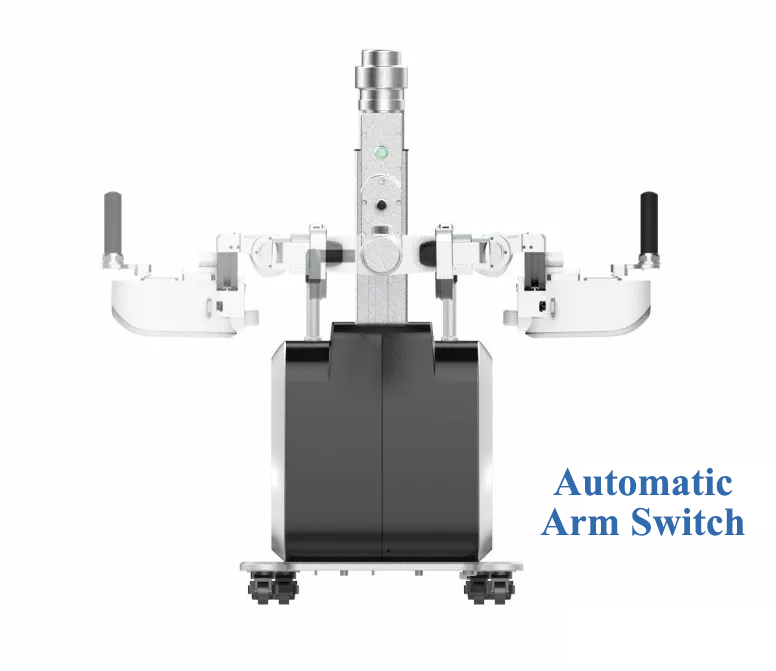
Interruptor de braç automàtic:El sistema d'entrenament i avaluació de les extremitats superiors és el primer robot de rehabilitació que realitza la funció d'interruptor automàtic del braç.Tot el que heu de fer és prémer un botó i podeu canviar entre el braç esquerre i el dret.L'operació de canvi de braç fàcil i ràpida redueix la complicitat de l'operació clínica.
Alineació làser:Ajudar al terapeuta en l'operació precisa.Permet als pacients entrenar en una posició més segura, més adequada i més còmoda.
Yeeconés un fabricant entusiasmat d'equips de rehabilitació des de l'any 2000. Desenvolupem i fabriquem diversos tipus d'equips de rehabilitació, com araequip de fisioteràpiairobòtica de rehabilitació.Disposem d'una cartera de productes integral i científica que cobreix tot el cicle de rehabilitació.També oferimsolucions holístiques de construcció de centres de rehabilitació. If you are interested in cooperating with us. Please feel free to leave us a message or send us email at: yikangexporttrade@163.com.
Esperem poder cooperar amb vosaltres.

Llegeix més:
Llançament de nous productes |Robot de rehabilitació de les extremitats inferiors A1-3
Què és un robot de rehabilitació?
Avantatges de la robòtica de rehabilitació
Hora de publicació: 19-gen-2022