





-

Pohodlná obsluha
-

Bezpečné a efektivní
-

Přesné hlášení



zjednodušený design;přizpůsobit křivku lidského těla a snížit tlak
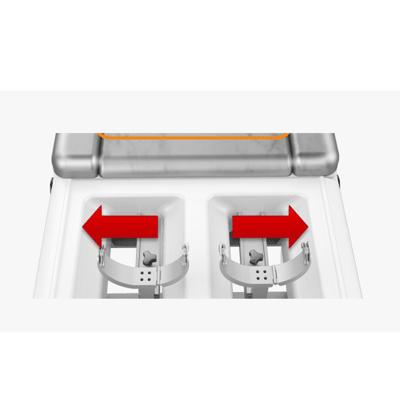
nastavení rozteče nohou;nastavení fixace délky nohou

udržovat a stabilizovat držení horní končetiny

přizpůsobit se většímu rozsahu pohybu kotník-noha;dále obnovit funkci kotníku-noha


Nová generace inteligentního robota pro rehabilitaci dolních končetin
Předefinujte inteligentní rehabilitaci dolních končetin
Počínaje klinickou praxí prozkoumejte lepší způsoby tréninku dolních končetin


Optimalizace výkonu pohybu

Použití technologie nulové vůle minimalizuje otřesy lůžka během stání, což pacientům poskytuje pohodlnější zážitek z ošetření.
Široký rozsah pohybu kloubů dolních končetin může poskytnout úplnější zážitek z tréninku chůze, takže každý kloub dolních končetin může cvičit v širším rozsahu.

Zvyšte úhel sklonu během kontinuálního tréninku krokování, abyste plně protáhli svaly zapojené do extenze kyčle.
SPECIFIKACE
SPECIFIKACE


