







Introduktion
Rehabiliteringsrobotten for overekstremiteterne anvender computervirtuel teknologi kombineret med teorien om rehabiliteringsmedicin for at simulere bevægelsesreglerne for menneskelige øvre lemmer i realtid, og patienter kan gennemføre multi-leddet eller enkeltleds-rehabiliteringstræning i det virtuelle computermiljø.
Systemet har også træning i overkropsvægtreduktion, intelligent feedback, multidimensionel rumtræning og et kraftfuldt evalueringssystem.Det er hovedsageligt velegnet til patienter med dysfunktion i overekstremiteterne forårsaget af slagtilfælde, cerebrovaskulær misdannelse, alvorlige hjernetraumer eller andre neurologiske sygdomme eller patienter, der har genvundet funktion af overekstremiteterne efter operationen.

Terapeutisk effekt
Fremme dannelsen af isoleret bevægelse
Stimuler resterende muskelstyrke
Forbedre muskeludholdenhed
Gendan fælles koordination
Gendan ledfleksibiliteten
Styrk overkroppens motoriske kontrol
Stærk tilknytning til ADL
Genopretning af overekstremiteternes funktion
Funktioner
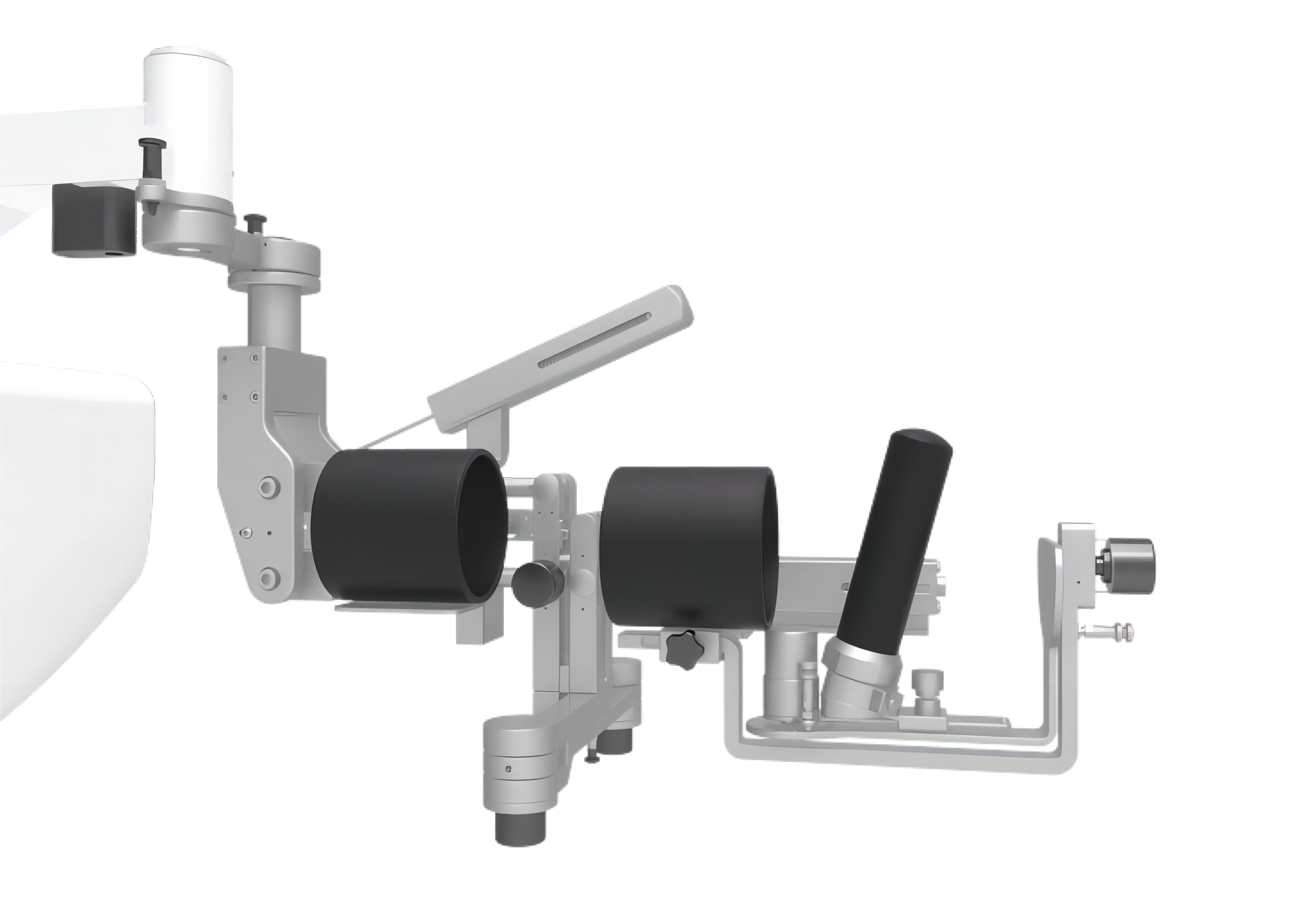
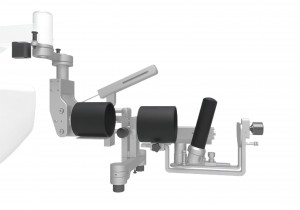
Funktion 1: Eksoskelet indpakket struktur
ledstøttebeskyttelse
fremme separationsbevægelse
Forbedret enkelt fælles kontrol
Separat justerbar underarms- og overarmsmodstand
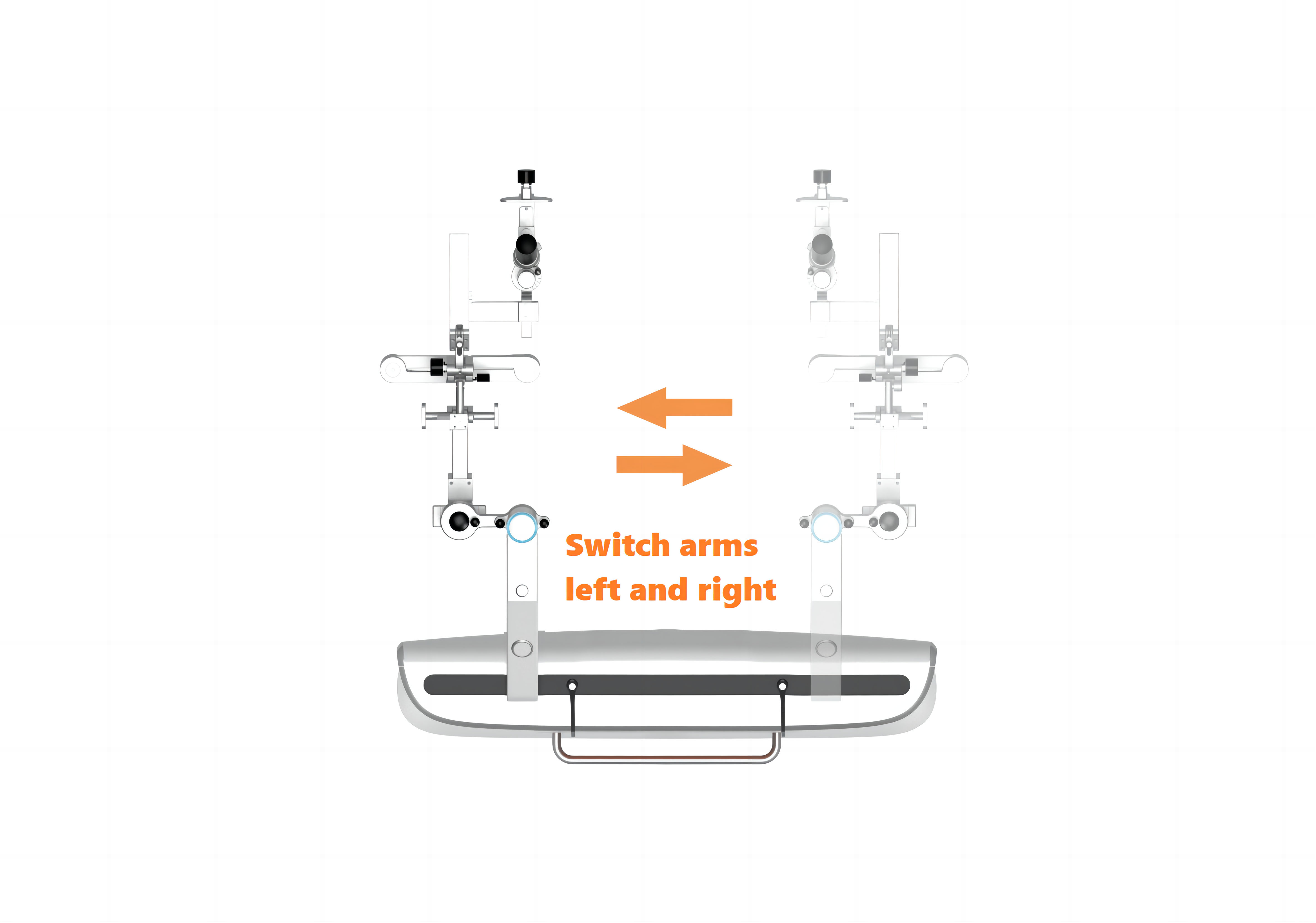
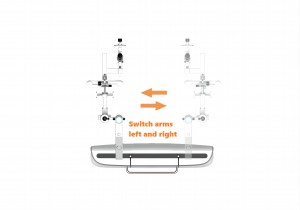
Funktion 2: Integreret armskiftedesign
Nemmere at skifte arm
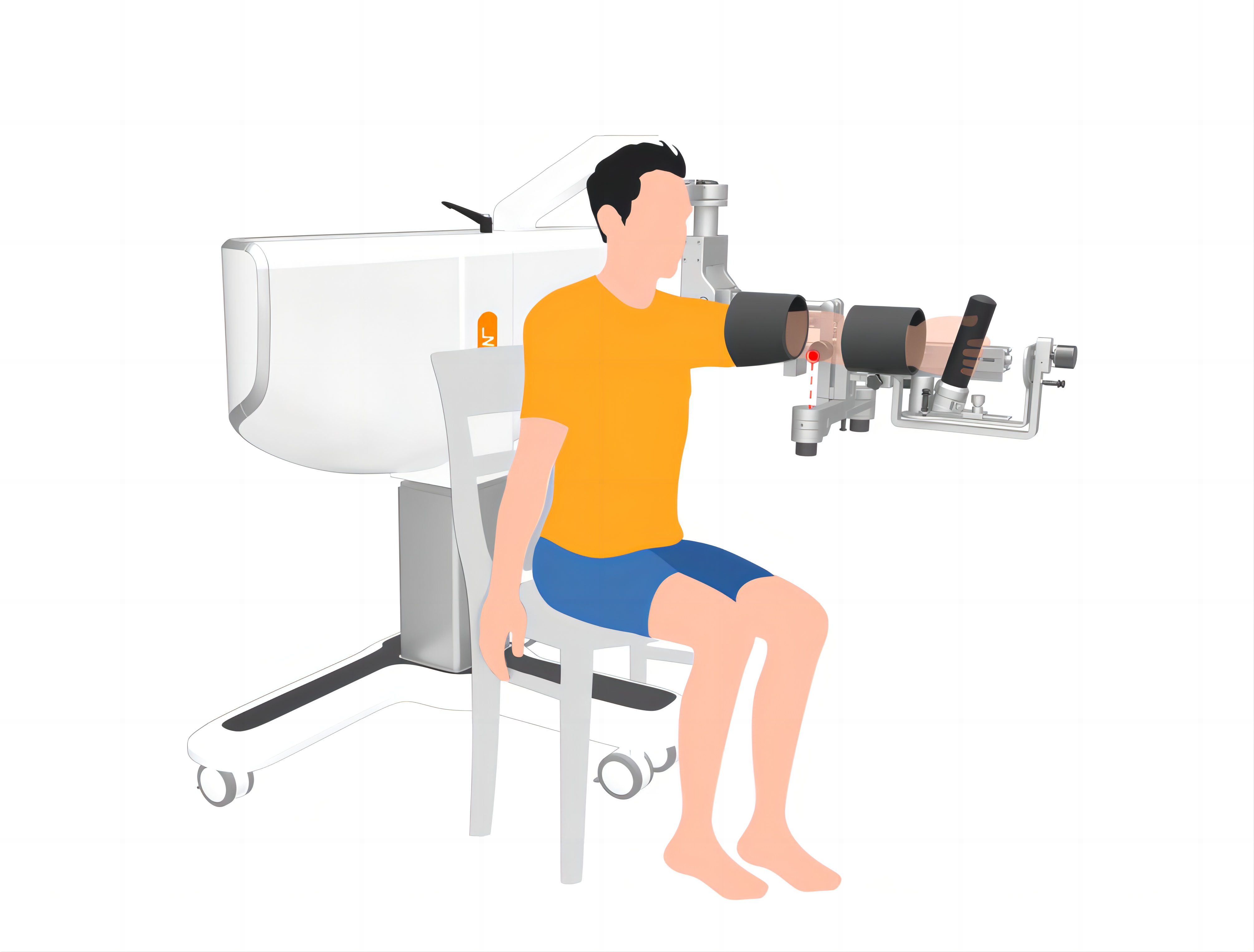
Funktion 3: Indbygget laserlocator
Nøjagtig placering af ledpositionen for at sikre sikker og effektiv behandling

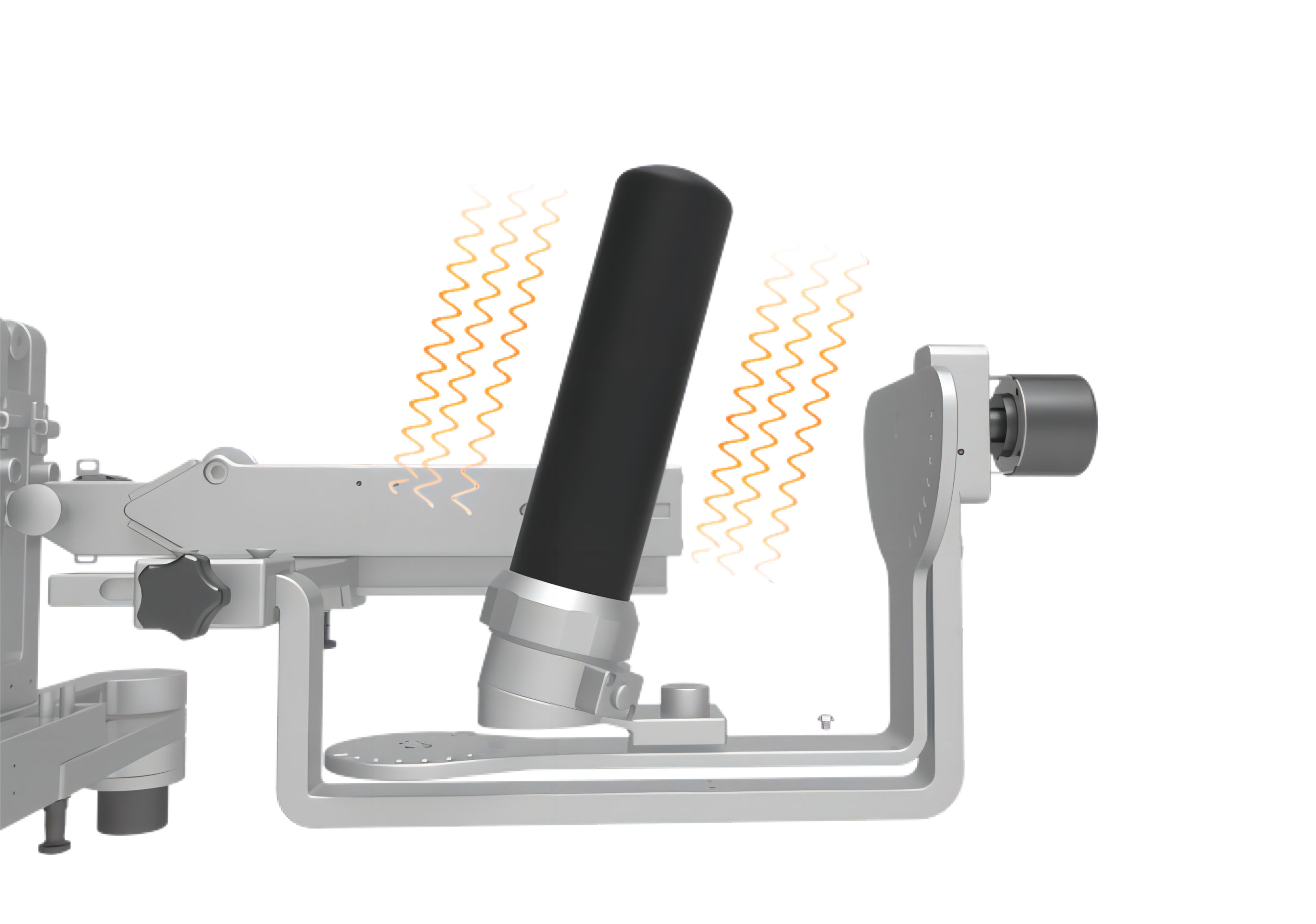
Funktion 4: håndgreb + vibrationsfeedback-stimulering
Realtidsfeedback om grebsstyrke
Evaluer vibrationsalarmer under træning

Funktion 5: Nøjagtig evaluering af enkelt led
Feature 6: 29 sceneinteraktioner
På nuværende tidspunkt er der 29 slags ikke-gentagende træningsspilprogrammer, som løbende opdateres og tilføjes
Funktion 7: Dataanalyse
Histogram, linjegrafdataoversigtsvisning
Sammenligning af to evalueringstræningsresultater





