







Enkonduko
La roboto de rehabilitado de supraj membroj adoptas komputilan virtualan teknologion, kombinitan kun la teorio de rehabilita medicino, por simuli la movadajn regulojn de homaj supraj membroj en reala tempo, kaj pacientoj povas kompletigi trejnadon pri multartiko aŭ unu-artiko en la komputila virtuala medio.
La sistemo ankaŭ havas trejnadon pri redukto de supra korpopezo, inteligentan retrosciigon, multdimensian spacan trejnadon kaj potencan taksadsistemon.Ĝi estas ĉefe taŭga por pacientoj kun misfunkcio de supraj membroj kaŭzitaj de apopleksio, cerbovaskula misformiĝo, severa cerba traŭmato aŭ aliaj neŭrologiaj malsanoj aŭ pacientoj, kiuj reakiris supran membrofunkcion post kirurgio.

Terapia Efekto
Antaŭenigi la formadon de izolita movado
Stimulu restan muskolforton
Plifortigi muskolan paciencon
Restarigu komunan kunordigon
Restarigu komunan flekseblecon
Plifortigu supran korpomotoran kontrolon
Forta asocio kun ADL
Reakiro de supra membro-funkcio
Trajtoj
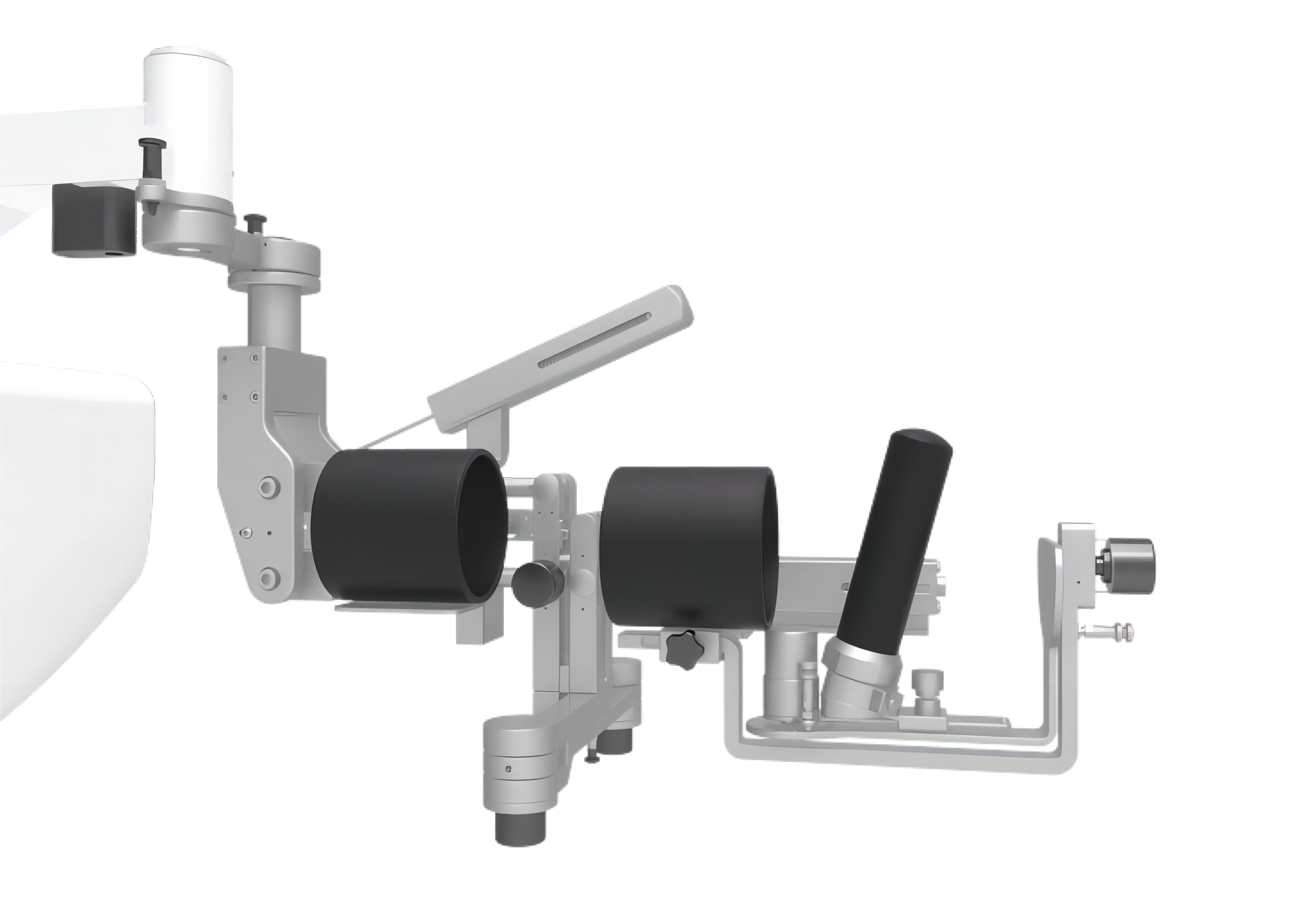
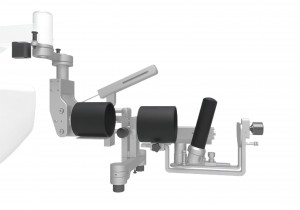
Karakterizaĵo 1: Eksoskeleto envolvita strukturo
komuna subteno protekto
promocii disiga movado
Plifortigita ununura komuna kontrolo
Aparte alĝustigebla antaŭbrako kaj supra brako rezisto
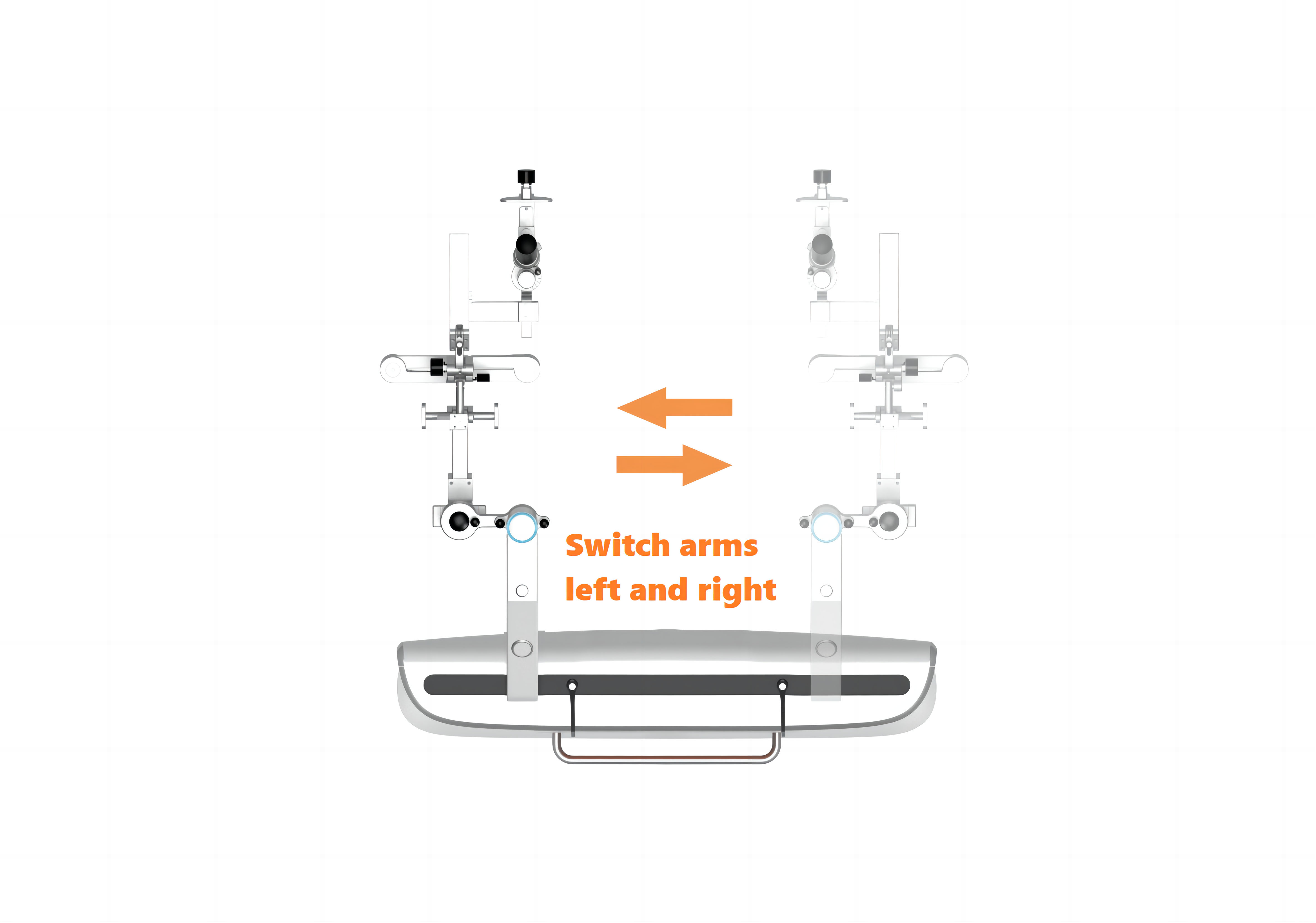
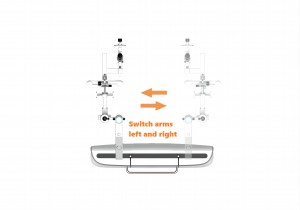
Karakterizaĵo 2: Integrita brakoŝanĝa dezajno
Pli facile ŝanĝi brakojn
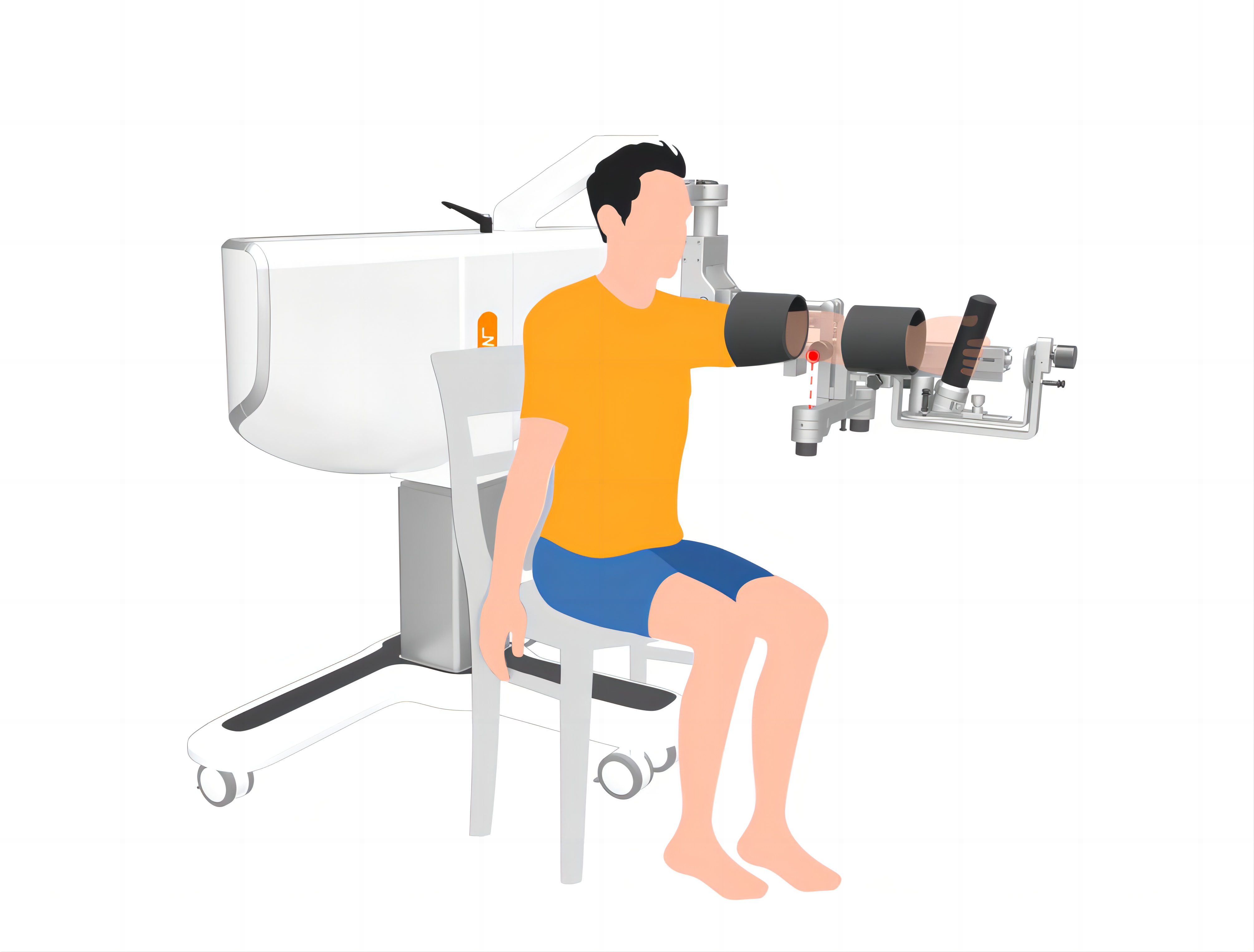
Karakterizaĵo 3: Enkonstruita lasera lokalizilo
Preciza pozicio de la komuna pozicio por certigi sekuran kaj efikan traktadon

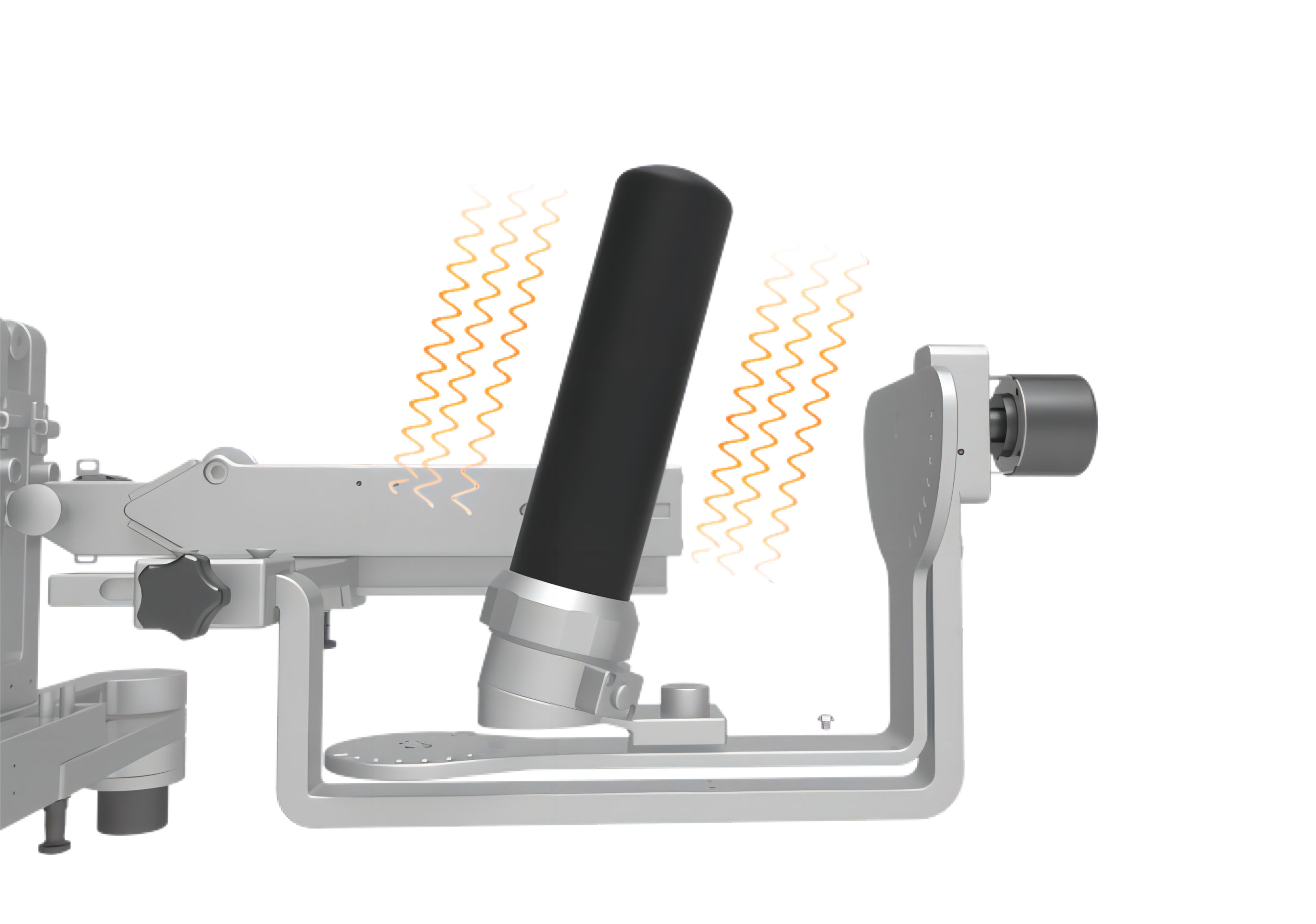
Karakterizaĵo 4: mantenilo + stimulado de vibro-realigo
Realtempaj rimarkoj pri kroĉforto
Taksi vibrajn atentigojn dum trejnado

Karakterizaĵo 5: Preciza taksado de ununura artiko
Trajto 6: 29 sceninteragoj
Nuntempe ekzistas 29 specoj de ne-ripetaj trejnaj ludprogramoj, kiuj estas kontinue ĝisdatigitaj kaj aldonitaj.
Karakterizaĵo 7: Analizo de datumoj
Histogramo, linia grafika datuma resuma ekrano
Komparo de iuj du rezultoj de trejnado pri taksado





