







Acerca do robot de rehabilitación de extremidades superiores A6-2S
Baseada na tecnoloxía informática, a robótica de rehabilitación e avaliación do brazo pode simular o movemento do membro superior en tempo real segundo a teoría da medicina de rehabilitación.Permite adestrar en 6 graos principais de liberdade no espazo tridimensional, realizando o control preciso no espazo 3D.Pódese facer unha avaliación precisa das seis direccións de movemento (adución e abdución do ombreiro, flexión do ombreiro, extorsión e intorsión da articulación do ombreiro, flexión do cóbado, pronación e supinación do antebrazo e flexión e dorsiflexión da palma do pulso) das tres principais articulacións de movemento do membro superior. (ombreiro, cóbado e pulso).Pode analizar os datos de avaliación en tempo real para axudar aos terapeutas a facer plans de tratamento, o que mellora a eficiencia clínica.O sistema ten cinco modos de adestramento, incluíndo adestramento pasivo, adestramento activo-pasivo e adestramento activo.Pódese utilizar durante todo o ciclo de rehabilitación.A función de adestramento está integrada con varios xogos interactivos virtuais situacionais orientados a tarefas, que ofrecen aos pacientes diversos adestramentos personalizados, mellorando as iniciativas e a dependencia dos pacientes e acelerando o progreso da rehabilitación dos pacientes.Os datos de avaliación e formación rexistraranse, gardaranse, analizaranse e poderán compartirse en tempo real cando o sistema estea conectado a internet.

A6 é aplicable a pacientes con disfunción do membro superior ou función limitada debido a enfermidades do sistema nervioso central, nervios periféricos, medula espiñal, músculos ou ósos.O produto admite exercicios específicos, aumenta a forza dos músculos, amplía o rango de movemento das articulacións e mellora a función motora.
–
5 modos de adestramento do robot de rehabilitación de extremidades superiores A6-2S
Modo de adestramento pasivo
A través do modo de "programación de traxectorias", os terapeutas poden establecer parámetros como o nome específico da articulación, o rango de movemento e a velocidade de movemento articular para proporcionar un adestramento de traxectoria pasiva personalizado e dirixido aos pacientes.A través dos interesantes xogos situacionais, o adestramento pasivo será máis agradable.
Modo de adestramento activo-pasivo
O sistema axuda aos pacientes a completar o adestramento mediante o axuste sobre a "forza guía".Canto maior sexa a forza guía, maior será o grao auxiliar do sistema;canto menor sexa a forza guía, maior será o grao de participación activa do paciente.Os terapeutas poden establecer a forza de guiado segundo o grao de forza muscular do paciente para estimular a forza muscular residual do paciente ao máximo durante o proceso de adestramento do xogo.
Modo de adestramento activo
Os pacientes poden conducir libremente o brazo mecánico para moverse en calquera dirección no espazo tridimensional.Os terapeutas poden facer unha selección personalizada das articulacións de adestramento segundo as necesidades do paciente e seleccionar xogos interactivos en consecuencia para o adestramento articular único ou múltiple.Deste xeito, pódese mellorar a iniciativa de formación dos pacientes e acelerar o progreso da rehabilitación.
Modo de adestramento de prescrición
Este modo está máis inclinado ao adestramento da vida diaria e á terapia ocupacional, que inclúe varias actividades da vida diaria, como peitearse, comer, etc. Os terapeutas poden escoller as receitas de adestramento en consecuencia para axudar ao paciente a comezar rapidamente o adestramento.Todos os axustes realízanse segundo a situación do paciente, garantindo que este é capaz de adaptarse ben ás actividades da vida diaria ao máximo.
Modo de aprendizaxe da traxectoria
A6 é un robot de rehabilitación de membros superiores 3D que ten función de memoria AI.O sistema está equipado cunha función de almacenamento de memoria na nube, que pode aprender e gravar a traxectoria de movemento específica do terapeuta e restaurala completamente. As traxectorias de movemento dirixidas e personalizadas están deseñadas para diferentes pacientes en consecuencia.Deste xeito, pódese realizar un adestramento enfocado e repetitivo para mellorar a función de movemento dos pacientes.
–
Vista de datos
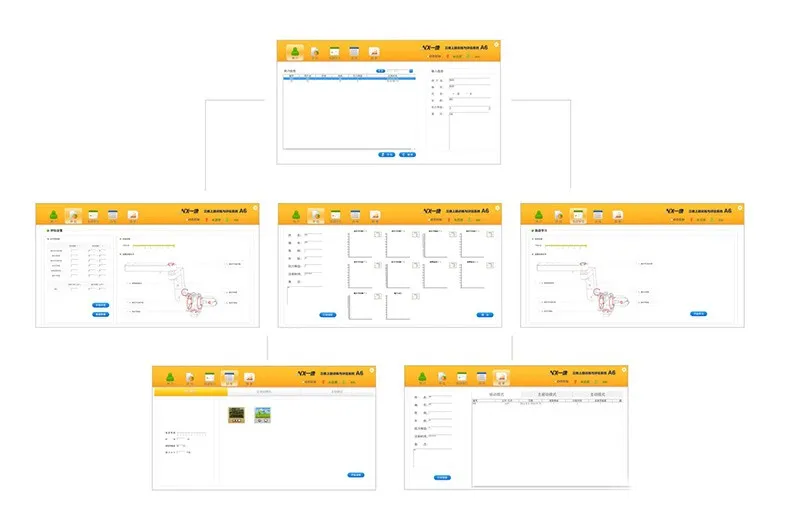
Usuario: inicio de sesión do paciente, rexistro, busca de información básica, modificación e eliminación.
Avaliación: Avaliación en ROM, arquivo e visualización de datos, así como impresión, e gravación de traxectoria e velocidade preestablecidas.
Informe: Permite ver os rexistros do historial de información do adestramento do paciente.
–
Características clave
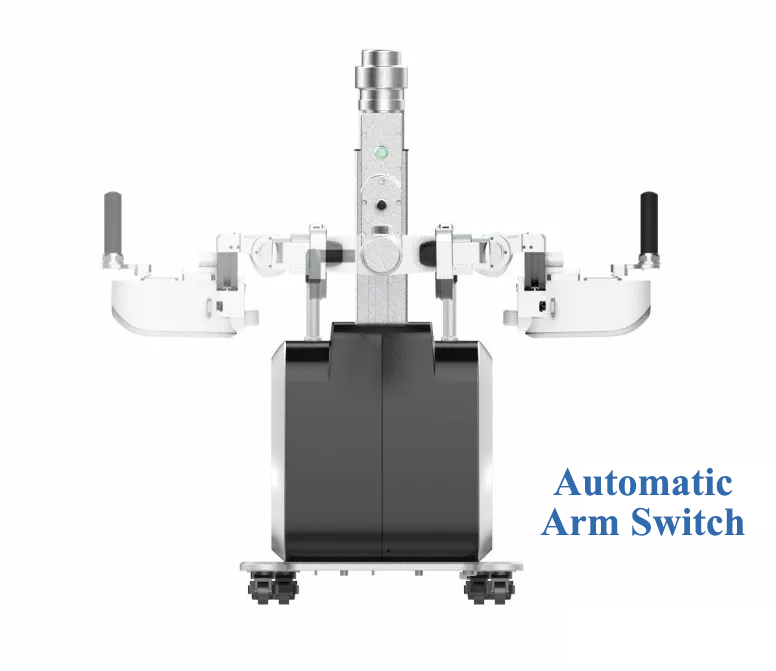
Interruptor de brazo automático:Upper Limb Training and Evaluation System é o primeiro robot de rehabilitación que realiza a función de interruptor automático do brazo.Todo o que tes que facer é presionar un botón e podes cambiar entre o brazo esquerdo e o dereito.A operación de cambio de brazo fácil e rápida reduce a complicidade da operación clínica.
Aliñación láser:Axudar ao terapeuta na operación precisa.Permitir aos pacientes adestrarse nunha posición máis segura, máis adecuada e máis cómoda.
Yeeconé un fabricante entusiasta de equipos de rehabilitación desde 2000. Desenvolvemos e fabricamos varios tipos de equipos de rehabilitación, comoequipos de fisioterapiaerobótica de rehabilitación.Contamos cunha carteira de produtos completa e científica que abarca todo o ciclo de rehabilitación.Tamén ofrecemossolucións holísticas de construción de centros de rehabilitación. If you are interested in cooperating with us. Please feel free to leave us a message or send us email at: yikangexporttrade@163.com.
Agardamos colaborar contigo.

Le máis:
Lanzamento de novos produtos |Robot de rehabilitación de extremidades inferiores A1-3
Que é o robot de rehabilitación?
Vantaxes da Robótica de Rehabilitación
Hora de publicación: 19-xan-2022