












ʻO ka hoʻohui ʻana i nā makahiki o ka ʻenehana hoʻoponopono naʻauao a me ka ʻike lapaʻau me ke ʻano hou o ka ʻoihana hoʻoponopono hou, ua hoʻomohala ʻo Yikang i ka ʻaoʻao haʻahaʻa a me ka ʻōnaehana hoʻonaʻauao A1-3.
HOOLAHA HUA
Hoʻohana ka papa ʻaina robotic tilt A1-3 i ka manaʻo hoʻoponopono hou e lanakila ai i nā hemahema o ka hoʻomaʻamaʻa hoʻoponopono kuʻuna.Kōkua ka papa ʻaina i ka poʻe maʻi i ka hoʻomaʻamaʻa hele wāwae.Ma ka hoʻolikelike ʻana i ka hele ʻana o ka physiological maʻamau, kōkua kēia mea hana i ka hoʻihoʻi ʻana i ka hiki ke hele wāwae.
He kūpono ʻo A1-3 no ka hoʻoponopono ʻana i nā poʻe maʻi i loaʻa i nā maʻi o ka ʻōnaehana nerve e pili ana i ka hahau ʻana a i ʻole ka ʻeha ʻeha o ka lolo a i ʻole nā ʻeha spinal cord piha ʻole.He hopena maikaʻi loa ia e hoʻohana ai i ka robot rehab ʻoi aku ka nui o ka hoʻomaka ʻana o ka hoʻoponopono.

Ma ke ʻano o ka hoʻoponopono hoʻoponopono ʻana, aia ʻekolu pae o ka hoʻomaʻamaʻa ʻana i nā lālā haʻahaʻa: ka hoʻomaʻamaʻa ʻana i nā hiʻohiʻona passive, ka hoʻomaʻamaʻa unilateral induced a me ka hoʻomaʻamaʻa pānaʻi ʻana.ʻO ia ka ʻōnaehana hoʻomaʻamaʻa naʻauao mua o nā lālā haʻahaʻa e kūkulu i kahi ala hoʻomaʻamaʻa holomua.
ʻO ka hoʻonui ʻana i ka hana ʻana
- E hoʻomaka ana mai ka hoʻomaʻamaʻa lapaʻau, e ʻimi i nā ʻano hoʻomaʻamaʻa haʻahaʻa haʻahaʻa.
- He kihi Orthostatic
- Hoʻohālikelike i ka hele wāwae
- Moena hiki ke hoʻololi
Hoʻololi ʻenehana akamai
- Hoʻoponopono ʻakomi ka lōʻihi o ka wāwae: e ana i ka lōʻihi o ka wāwae o ka mea maʻi
- Hoʻokahi pihi ka lōʻihi o ka wāwae: Hoʻihoʻi ʻakomi i ka lōʻihi o ka wāwae o ka mea maʻi
- Hoʻokahi pihi moena moe: hoʻihoʻi hou i ke kūlana mākaukau
Hoʻomaka ʻenehana hoʻoponopono
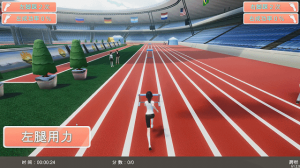
- ʻO ka hiʻohiʻona ola 3D kiʻekiʻe-definition hou, ʻike pilikino immersive
- Ka loiloi o ka neʻe ʻana o nā lālā haʻahaʻa, Hoʻohui i ka hoʻomaʻamaʻa a me ka loiloi
- ʻO ka ʻikepili a me nā helu helu, ka hōʻuluʻulu ʻokoʻa o ka ʻikepili aʻo a me ka loiloi
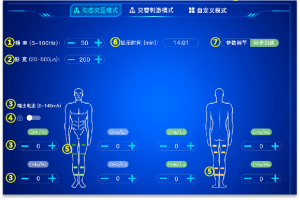
- Ka hoʻomaʻamaʻa ʻana i nā kaʻa kaʻa haʻahaʻa i hui pū ʻia me ka hoʻoulu uila uila (FES)
E pili ana i ka Lower Limb Intelligent Feedback & Training System A1-3
1.HOOLAHA HANA
1.1kū kūʻokoʻa 0-90°
ʻO ka hoʻohana ʻana i ka ʻenehana hoʻomaʻemaʻe ʻole e hōʻemi i ka lulu ʻana o ka moena i ka wā e kū ana, e hāʻawi ana i nā mea maʻi i kahi ʻike lapaʻau ʻoluʻolu.

1.2 ʻO ka neʻe ʻana o ka hele wāwae ʻoiaʻiʻo, ʻo ke kihi hui ʻana o ka ʻūhā 0-45°
Hiki i kahi laula o ka neʻe ʻana o nā lālā haʻahaʻa haʻahaʻa ke hāʻawi i kahi ʻike hoʻomaʻamaʻa hele wāwae piha loa, i hiki i kēlā me kēia hui o nā lālā haʻahaʻa ke hoʻoikaika i kahi ākea ākea.

1.3 0-15° Moena moe
E hoʻonui i ke kihi hoʻihoʻi i ka wā e hoʻomaʻamaʻa mau ai i ka hoʻomaʻamaʻa ʻana e hoʻopololei i nā ʻiʻo i pili i ka hoʻonui ʻana i ka ʻūhā.

2.HANA HANA HANA HANA
- Hoʻoponopono ʻakomi ka lōʻihi o ka wāwae
- Hoʻoponopono hou i ka lōʻihi o ka wāwae
- Hoʻoponopono Moena ʻakomi

3.HANA HANA HANA
Hoʻomaʻamaʻa hoʻomaʻamaʻa Virtual Interactive:Hoʻohana ʻia ka ʻenekini 3D hou e kūkulu i nā hiʻohiʻona hoʻomaʻamaʻa kiʻekiʻe-simulation, e hana ana i ka pilina ma waena o ka hoʻomaʻamaʻa hoʻoikaika kino a me ke ola maoli.

Ka Loiloi o ka Motion:ʻO A1-3 ka mea mua e hoʻolauna i ka loiloi ROM lālā haʻahaʻa ma nā moʻo naʻauao o nā lālā haʻahaʻa.Hiki iā mākou ke nānā i ka holomua o ka hiki o nā lālā haʻahaʻa o nā maʻi i kēlā me kēia manawa.Hoʻopaʻa ʻia ke kihi o ka neʻe ʻana o nā lālā haʻahaʻa e ka mea hana.Hoʻonohonoho ʻia nā moʻolelo i nā hoʻonohonoho hoʻomaʻamaʻa

ʻIkepili helu ʻakomi:E hōʻuluʻulu 'akomi i ka ʻikepili aʻo a me ka loiloi o ka hoʻomaʻamaʻa hoʻomanawanui i nā manawa like ʻole, a hōʻike maka i ka hoʻihoʻi ʻana o ka mea maʻi.

Nā ʻōlelo aʻoaʻo kamaʻilio intuitive:ʻO ka wikiwiki pāʻani ikaika, Hoʻoikaika i ka mana manawa
Nā palapala aʻo like ʻole:ʻO ka hoʻoikaika kino, ka hoʻohālikelike hiʻohiʻona;Ka wāwae hema / ʻākau, hoʻokahi aʻo wāwae;Hoʻomaʻamaʻa hoʻomaʻamaʻa ʻana i ka wāwae hema a me ka ʻākau
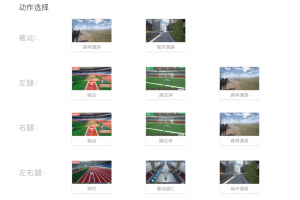
Hoʻonaʻauao ola:Ma muli o nā hiʻohiʻona o ke ola o kēlā me kēia lā;E hoʻokumu i nā hiʻohiʻona pili loa me ka neʻe ʻana o ka ʻaoʻao haʻahaʻa

Ka Loiloi ROM Laha Haahaa
4.HOOLAHA ERGONOMIC
Hapai wāwae wāwae: ʻO ka hana bionic kuʻekuʻe wāwae hou e hiki ai i kahi ākea ākea o ka holo wāwae wāwae, e kōkua ana i ka hoʻihoʻi hou ʻana i ka hana kuʻekuʻe wāwae a me ka wāwae.

Hiki ke hoʻoneʻe lima: ʻO ka hoʻolālā ʻano arc o ka lima mīkini e kūpono i ka lima o ke kino kanaka a hiki ke hoʻopaʻa i ke kūlana lima i ka wā hoʻomaʻamaʻa.Mālama a hoʻopaʻa i ke kūlana o ka lālā luna.

Hiki ke hoʻololi ʻia ka wāwae wāwae: Hiki ke hoʻololi ʻia ka wāwae wāwae e like me ka nui o ke kino o ka poʻe maʻi e hōʻoia i ka hoʻomaʻamaʻa ʻana o nā mea maʻi i kahi kūlana ʻoluʻolu.

Hoʻopaʻa wāwae hiki ke hoʻoponopono: Hiki ke hoʻololi i ka hoʻopaʻa ʻana o ka wāwae e like me ka lōʻihi o ka wāwae o ka mea maʻi e hoʻololi i ke ʻano kino o ka mea maʻi.

Hoʻolālā moe maʻalahie kūpono i ke kino o ke kanaka, e hoʻemi ana i ke kaomi

5.EHANA XCLUSIVE:hui pū me ka myoelectricity ili

Nā mea koʻikoʻi o Lower Limb Rehab Robot A1-3:
1. Hoʻopaʻa ʻia i ka ʻenehana hilinaʻi hope, kōkua i ka hoʻonui ʻana i ka ʻūhā, kokoke i ka hele ʻana o ke kino, hoʻopau i nā ʻano hoʻohālikelike kūlohelohe
2. ʻOi aku ka maikaʻi o ka lawelawe ʻana: hoʻoponopono ʻokoʻa ka lōʻihi o ka wāwae a me nā hana hoʻihoʻi hoʻokahi kī
3. Ke kaʻina hana aʻo i ʻike ʻia: ʻO ka loiloi hana hui kūʻokoʻa i ka hana hōʻike manawa maoli
4. Palekana a ʻoluʻolu: ergonomic lima hoʻomaha hoʻolālā e pale aku i ka hoʻokaʻawale ʻana o ka poʻohiwi
5. Hiki ke hoʻololi ʻia ka wāwae a me nā kuʻekuʻe wāwae no nā hoʻonohonoho hoʻomaʻamaʻa pilikino
6. Hoʻohui me ka electromyography o ka honua: hoʻohui i ka hele wāwae a me ka hoʻoulu uila e hoʻihoʻi i ka hana gait





