







E pili ana i ka Robot A6-2S o ka hoʻoponopono ʻana i ka ʻaoʻao kiʻekiʻe
Ma muli o ka ʻenehana kamepiula, hiki i ka hoʻoponopono lima a me ka loiloi loiloi ke hoʻohālikelike i ka neʻe ʻana o nā lālā o luna i ka manawa maoli e like me ka manaʻo lāʻau lapaʻau.Hāʻawi ia i ka hoʻomaʻamaʻa ʻana i 6 mau degere nui o ke kūʻokoʻa ma kahi ākea ʻekolu, me ka ʻike ʻana i ka mana pololei ma kahi ākea 3D.Hiki ke hana ʻia ka loiloi pololei no nā ʻaoʻao ʻeono (ka hoʻonui ʻana i ka poʻohiwi a me ka ʻaihue ʻana, ka hoʻololi ʻana i ka poʻohiwi, ka hoʻoneʻe ʻana a me ka hoʻokaʻawale ʻana o ka poʻohiwi, ka kuʻekuʻe lima, ka pronation o ka lima a me ka supination, a me ka hoʻololi ʻana o ka lima lima a me ka dorsiflexion) o nā hui nui ʻekolu o ka lālā luna. (poʻohiwi, kuʻe lima a me ka lima lima).Hiki iā ia ke kālailai i ka ʻikepili loiloi i ka manawa maoli i mea e kōkua ai i nā mea lapaʻau e hana i nā hoʻolālā lapaʻau, e hoʻonui ai i ka pono lapaʻau.Loaʻa i ka ʻōnaehana nā ʻano hoʻomaʻamaʻa ʻelima me ka hoʻomaʻamaʻa passive, ka hoʻomaʻamaʻa hoʻoikaika-passive a me ka hoʻomaʻamaʻa hana.Hiki ke hoʻohana ʻia i loko o ke kaʻina hoʻoponopono holoʻokoʻa.Hoʻohui ʻia ka hana hoʻomaʻamaʻa me nā pāʻani pāʻani pāʻani maʻamau e pili ana i ka hana, e hāʻawi ana i nā poʻe maʻi me nā hoʻomaʻamaʻa pilikino like ʻole, ka hoʻomaikaʻi ʻana i nā hana a me ka hilinaʻi ʻana o nā mea maʻi, a me ka hoʻolalelale ʻana i ka holomua o ka hoʻoponopono hou ʻana.E hoʻopaʻa ʻia ka ʻikepili loiloi a me ka hoʻomaʻamaʻa ʻana, mālama ʻia, nānā ʻia a hiki ke kaʻana like i ka manawa maoli ke pili ka ʻōnaehana i ka pūnaewele.

Hoʻohana ʻia ka A6 i nā poʻe maʻi me ke kīpē ʻana o ka lālā luna a i ʻole ka hana palena ʻole ma muli o ka ʻōnaehana nerve waena, ke aʻalolo peripheral, spinal cord, muscle, a i ʻole ka maʻi iwi.Kākoʻo ka huahana i nā hoʻomaʻamaʻa kikoʻī, hoʻonui i ka ikaika o nā ʻiʻo, hoʻonui i ka laulā o ka neʻe ʻana no nā hono, a hoʻomaikaʻi i ka hana kaʻa.
–
5 Nā ʻano hoʻomaʻamaʻa ʻana o ka Robot A6-2S hoʻomaʻamaʻa kiʻekiʻe
ʻAno hoʻomaʻamaʻa ʻana
Ma o ke ʻano 'trajectory programming', hiki i nā mea lapaʻau ke hoʻonohonoho i nā ʻāpana e like me ka inoa hui i manaʻo ʻia, ke ʻano o ka neʻe a me ka wikiwiki o ka neʻe ʻana i mea e hāʻawi ai i ka hoʻomaʻamaʻa pilikino passive trajectory no nā maʻi.Ma o nā pāʻani kūlana hoihoi, e ʻoi aku ka leʻaleʻa o ka hoʻomaʻamaʻa passive.
ʻO ke ʻano hoʻomaʻamaʻa Active-Passive
Kōkua ka ʻōnaehana i nā poʻe maʻi e hoʻopau i ka hoʻomaʻamaʻa ʻana ma o ka hoʻoponopono ʻana ma luna o 'ikaika alakaʻi'.ʻO ka nui o ka ikaika alakaʻi, ʻoi aku ka kiʻekiʻe o ke degere kōkua ʻōnaehana;ʻoi aku ka liʻiliʻi o ka ikaika alakaʻi, ʻoi aku ka kiʻekiʻe o ke degere komo ikaika o ka mea maʻi.Hiki i nā mea lapaʻau ke hoʻonohonoho i ka ikaika alakaʻi e like me ke degere o ka ikaika ʻiʻo o ka mea maʻi i mea e hoʻoulu ai i ke koena o ka ikaika o ka ʻiʻo o ka mea maʻi i ka lōʻihi loa i ke kaʻina aʻo pāʻani.
ʻAno hoʻomaʻamaʻa ʻeleu
Hiki i nā poʻe maʻi ke hoʻokuʻu wale i ka lima mechanical e neʻe i kēlā me kēia ʻaoʻao ma kahi ākea ʻekolu.Hiki i nā mea lapaʻau ke koho pilikino i nā hui hoʻomaʻamaʻa e like me ka makemake o ka mea maʻi a koho i nā pāʻani pāʻani e like me ka hoʻomaʻamaʻa hui ʻana hoʻokahi a i ʻole he nui.Ma kēia ala, hiki ke hoʻomaikaʻi ʻia ka hoʻomaʻamaʻa hoʻomaʻamaʻa ʻana o ka poʻe maʻi a hiki ke hoʻolalelale i ka holomua hoʻoponopono.
Ke ʻano hoʻomaʻamaʻa ʻōlelo kuhikuhi
ʻOi aku ka makemake o kēia ʻano i ka hoʻomaʻamaʻa ʻana i ka nohona o kēlā me kēia lā a me ka ʻoihana hana, e pili ana i nā hana like ʻole o ka nohona o kēlā me kēia lā e like me ka hui ʻana i ka lauoho, ka ʻai ʻana, a me nā mea ʻē aʻe.Hana ʻia nā hoʻonohonoho āpau e like me ke kūlana o ka mea maʻi, e hōʻoia i ka hiki i ka mea maʻi ke hoʻololi maikaʻi i nā hana o ke ola o kēlā me kēia lā i ka lōʻihi loa.
ʻAno aʻo alahele
ʻO A6 kahi lopako hoʻoponopono 3D o luna me ka hana hoʻomanaʻo AI.Hoʻolako ʻia ka ʻōnaehana me ka hana mālama ʻana i ke ao, hiki ke aʻo a hoʻopaʻa i ka trajectory neʻe kikoʻī o ka mea lapaʻau a hoʻihoʻi piha.Ma kēia ʻano, hiki ke hoʻokō ʻia ka hoʻomaʻamaʻa ʻana a me ka hoʻomaʻamaʻa hou ʻana i hiki ke hoʻomaikaʻi ʻia ka hana o ka poʻe maʻi.
–
Nānā ʻIkepili
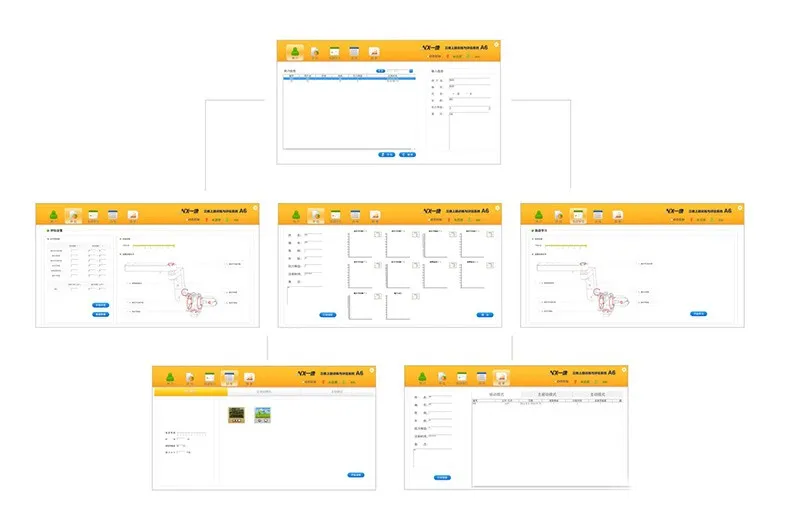
Mea hoʻohana: Ke komo ʻana o ka poʻe maʻi, hoʻopaʻa inoa, ʻimi ʻike kumu, hoʻololi, a holoi ʻia.
Heluhelu: ʻO ka loiloi ma ROM, ka waihona ʻikepili a me ka nānā ʻana a me ka paʻi ʻana, a me ka hoʻonohonoho mua ʻana a me ka hoʻopaʻa wikiwiki ʻana.
Hōʻike: Nānā i nā moʻolelo mōʻaukala hoʻomaʻamaʻa maʻi.
–
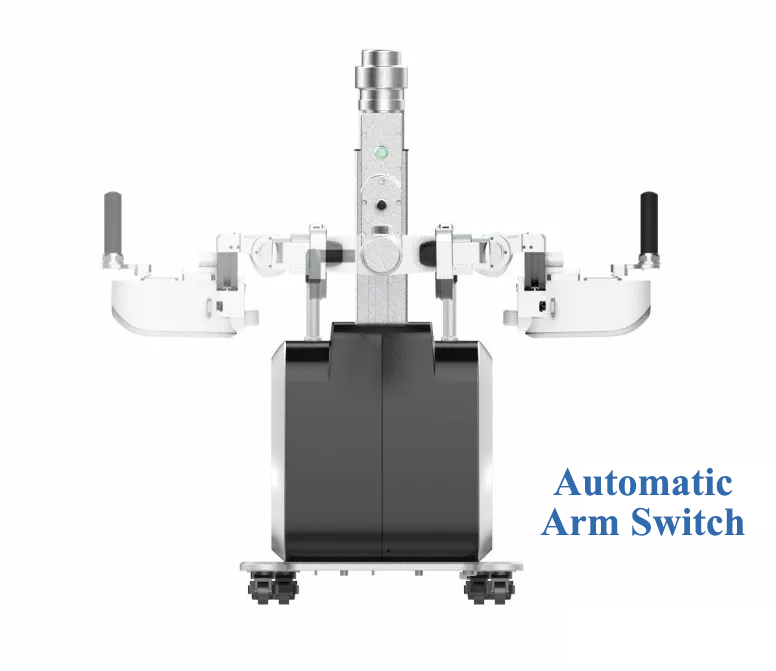
Nā mea nui
Hoʻololi lima ʻakomi:ʻO ka Upper Limb Training and Evaluation System ka robot rehabilitation mua i ʻike i ka hana o ka hoʻololi lima lima.ʻO nā mea a pau āu e hana ai, ʻo ke kaomi ʻana i hoʻokahi pihi, a hiki iā ʻoe ke hoʻololi ma waena o ka lima hema a me ka lima ʻākau.ʻO ka hana hoʻololi lima maʻalahi a me ka wikiwiki e hōʻemi i ka paʻakikī o ka hana lapaʻau.
Hoʻopololei Laser:E kōkua i ke kauka i ka hana pololei.Hiki i nā poʻe maʻi ke hoʻomaʻamaʻa i kahi kūlana palekana, kūpono a ʻoi aku ka ʻoluʻolu.
Yeeconhe mea hana ikaika i nā mea hana hoʻoponopono mai ka makahiki 2000. Hoʻomohala a hana mākou i nā ʻano mea hana hoʻoponopono e like memea hana physiotherapyanā lopako hoʻoponopono.Loaʻa iā mākou kahi waihona huahana piha a ʻepekema e uhi ana i ka pōʻai holoʻokoʻa o ka hoʻoponopono.Hāʻawi pū mākouholistic rehabilitation center construction solutions. If you are interested in cooperating with us. Please feel free to leave us a message or send us email at: yikangexporttrade@163.com.
Manaʻo mākou e hana pū me ʻoe.

E heluhelu hou:
Hoʻolaha Huahana Hou |Lopako A1-3 o ka Laʻa Haʻahaʻa
He aha ka Robot Rehabilitation?
Nā Pōmaikaʻi o ka Hoʻoponopono Robotics
Ka manawa hoʻouna: Jan-19-2022