












Konbine ane nan teknoloji reyabilitasyon entèlijan ak eksperyans klinik ak tandans nan dènye nan endistri reyabilitasyon, Yikang devlope pi ba manm fidbak entelijan & fòmasyon sistèm A1-3.
ENTWODIKSYON PWODWI
Tablo enklinezon robotik A1-3 itilize nouvo konsèp reyabilitasyon pou simonte enpèfeksyon fòmasyon reyabilitasyon tradisyonèl la.Tab la enklinezon ede pasyan yo fè fòmasyon mache.Pa similye nòmal demach fizyolojik, ekipman sa a ede retabli kapasite mache pasyan yo.
A1-3 se apwopriye pou reyabilitasyon pasyan ki soufri maladi nan sistèm nève a ki gen rapò ak yon konjesyon serebral oswa blesi twomatik nan sèvo oswa blesi nan mwal epinyè enkonplè.Li se reyèlman yon solisyon efikas yo sèvi ak robo nan reyabilitasyon espesyalman nan premye etap yo nan reyabilitasyon.

An tèm de tretman reyabilitasyon, gen twa nivo fòmasyon manm pi ba yo: fòmasyon entèraksyon sèn pasif, fòmasyon inilateral pwovoke ak altène fòmasyon entèaktif.Li se premye fidbak entèlijan ak sistèm fòmasyon manm pi ba yo pou konstwi yon chemen fòmasyon pwogresif.
Optimizasyon pèfòmans mouvman
- Kòmanse nan pratik klinik, eksplore pi bon metòd fòmasyon manm pi ba yo.
- ang ortostatik
- Simulation mouvman mache
- Kabann reglabl
Entelijan Inovasyon Teknoloji
- Ajisteman otomatik longè janm: mezire longè janm pasyan an otomatikman
- Yon bouton reset longè janm: Otomatikman retabli longè janm pasyan an
- Yon bouton reset kabann: otomatikman retabli nan kondisyon pare
Rekouvèt Teknoloji Reyabilitasyon
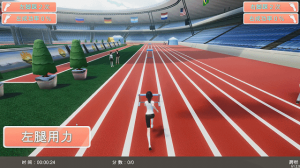
- Nouvo sèn lavi vityèl 3D wo-definisyon, eksperyans vityèl Immersion
- Evalyasyon mobilité manm ki pi ba yo, Entegrasyon fòmasyon ak evalyasyon
- Otomatik analiz ak estatistik, rezime otomatik sou fòmasyon miltip ak done evalyasyon
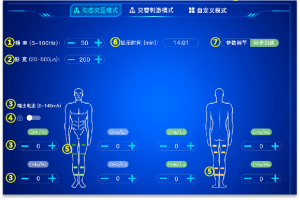
- Antrènman motè pi ba manm konbine avèk eksitasyon elektrik nan misk sifas (FES)
Konsènan Lower Limb Entelijan Feedback & Fòmasyon Sistèm A1-3
1.OPTIMIZASYON MOUVÈ
1.1ortostatik kanpe 0-90 °
Itilizasyon teknoloji zewo clearance minimize souke kabann lan pandan kanpe, bay pasyan yo yon eksperyans tretman pi konfòtab.

1.2 Mouvman mache reyalis, ang mouvman jwenti anch 0-45 °
Yon lajè ranje mouvman jwenti pi ba yo ka bay yon eksperyans fòmasyon pi konplè pou mache, pou chak jwenti nan branch pi ba yo ka fè egzèsis nan yon pwolonje pi laj.

1.3 0-15° Kabann ki chita
Ogmante ang la kouche pandan fòmasyon kontinyèl etap pou konplètman detire misk ki enplike nan ekstansyon anch.

2.INOVASYON TEKNOLOJI ENTELIJAN
- Otomatik Ajisteman Longè Janm
- Otomatik Leg Length Reyajiste
- Otomatik Reset kabann

3.TEKNOLOJI REHABILITATION
Virtual Fòmasyon entèaktif:Nouvo motè 3D yo itilize pou konstwi sèn egzèsis segondè-simulation, ki fòme entèkoneksyon ant fòmasyon egzèsis ak lavi reyèl.

Evalyasyon Range of Motion:A1-3 se premye moun ki prezante evalyasyon ROM pi ba manm nan seri entèlijan branch pi ba yo.Li pèmèt nou obsève pwogrè nan kapasite mouvman manm pi ba pasyan yo nenpòt ki lè.Aparèy la anrejistre ang mouvman branch pi ba yo.Dosye yo senkronize ak anviwònman fòmasyon yo

Otomatik analiz estatistik:Otomatikman rezime fòmasyon ak evalyasyon done fòmasyon pasyan an nan diferan peryòd tan, epi montre vizyèlman rekiperasyon fonksyonèl pasyan an.

Enstriksyon entèraksyon entwisyon:Bonjan rapid entèaktif, Egzèsis kontwòl distribisyon
Fòm fòmasyon divèsifye:Egzèsis pasif, simulation senaryo;Janm gòch/dwat, yon fòmasyon janm;Gòch & Dwa janm antrènman similtane altène
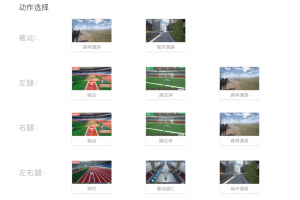
Fòmasyon oryante lavi:Ki baze sou senaryo lavi chak jou;Etabli sèn ki trè asosye ak mouvman ekstremite pi ba yo

Lower Limb ROM Evalyasyon
4.ERGONOMIK DESIGN
Leve pedal pye: Nouvo estrikti byonik cheviy-pye a pèmèt yon ranje pi laj nan mouvman cheviy-pye, ede ak rekiperasyon an plis nan fonksyon cheviy ak pye.

Akoudwar mobil: Konsepsyon ki gen fòm arc nan bra machin lan adapte bra kò imen an epi li ka estabilize pozisyon bra a pandan fòmasyon.Li kenbe ak estabilize pwèstans manm anwo yo.

Espas janm reglabl: Espas janm yo ka ajiste selon gwosè kò pasyan yo pou asire pasyan yo ap antrene nan yon pozisyon konfòtab.

Fiksasyon janm reglabl: Ka fikse janm la ka chanje selon longè janm pasyan an pou adapte yo ak fòm kò pasyan an.

Konsepsyon kabann rasyonalizeanfòm koub kò moun, diminye presyon

5.EFonksyon ksklizif:konbinezon ak myoelectricity sifas yo

Pwen esansyèl nan Lower Limb Rehab Robot A1-3:
1. Teknoloji patante tounen apiye, ede ekstansyon anch, pi pre demach fizyolojik, siprime modèl reflèks nòmal.
2. Pi wo efikasite sèvis: eksklizif otomatik ajisteman longè janm ak fonksyon reset yon sèl-kle
3. Pwosesis fòmasyon vizyalize: Eksklizif evalyasyon aktivite jwenti fonksyon ekspozisyon an tan reyèl
4. San danje ak konfòtab: konsepsyon ergonomic bra pou anpeche debwatman zepòl
5. Reglabl janm ak cheviy espas pou anviwònman fòmasyon pèsonalize
6. Konbinezon ak elektwomyografi sifas: konbine mache ak eksitasyon elektrik pou retabli fonksyon demach





