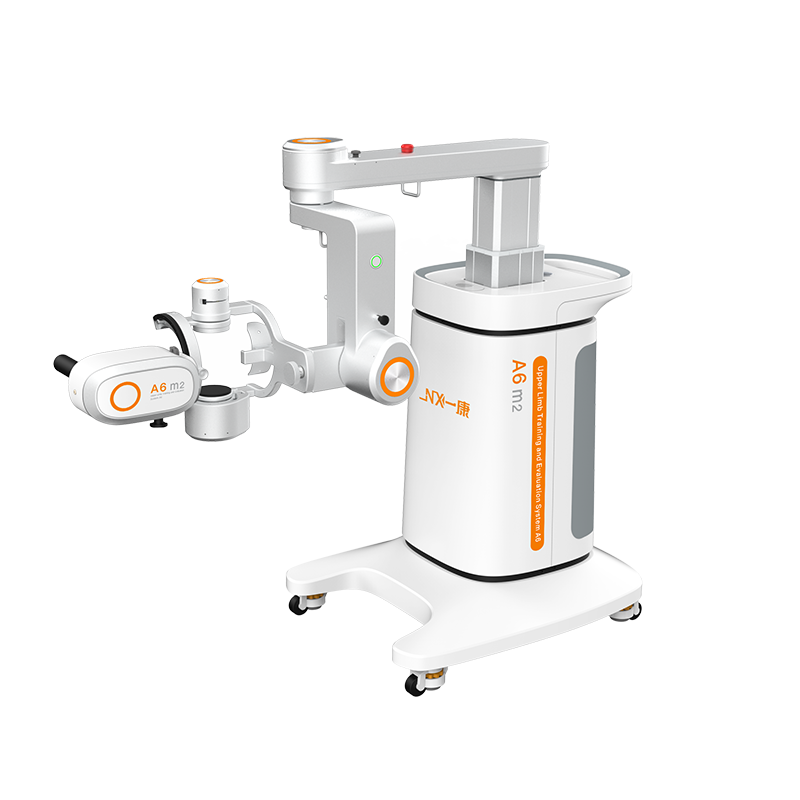
ENTWODIKSYON - Fòmasyon manm anwo ak sistèm evalyasyon A6M2 se dènye jenerasyon Yikang nan robo reyabilitasyon entèlijan manm anwo a.Li sèvi ak modèl dijital fòmasyon ak algorithm fòmasyon Yikang espò anwo manm yo, konbine avèk teyori reyabilitasyon espò anwo manm yo, pou simulation mouvman manm anwo imen an nan tan reyèl, epi li ka reyalize mouvman pasif, mouvman aktif ak konbine mouvman aktif ak pasif nan manm anwo yo nan plizyè dimansyon. . 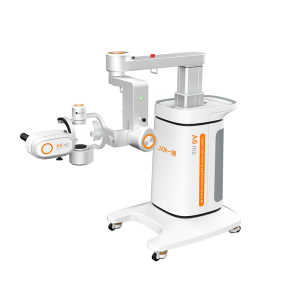 Pwodui sa a entegre evalyasyon reyabilitasyon, entèraksyon sèn, fòmasyon simulation aktivite lavi chak jou, fòmasyon pwogram entèlijan ak aprantisaj trajèktwa pèsonalize ak fòmasyon, epi li bay evalyasyon fonksyonèl manm anwo ak fòmasyon pou pasyan ki gen malfonksyònman fòs nan misk klas 0-5 akselere pwosesis rekiperasyon an. pasyan yo. AVANTAJ - 1.Li ka reyalize mouvman pasif ak mouvman aktif nan manm anwo yo nan plizyè dimansyon.Pasyan yo ka antrene san fòs nan misk ditou. 2. Ranje mouvman jwenti yo mande pou konplete fòmasyon jwèt la reflete pa valè evalyasyon pasyan an. 3. Avèk mòd aprantisaj trajectoire, aprann ak anrejistre jiska 3 minit nan manipilasyon trajectoire, kondwi pasyan yo fè fòmasyon terapi restorasyon trajèktwa manipilasyon, epi fè yon gwo kantite fòmasyon reyabilitasyon repetitif pou pasyan bonè amelyore efikasite fòmasyon. 4.Mòd fòmasyon divèsifye pou satisfè bezwen pasyan yo nan divès etap fòmasyon reyabilitasyon. 5.Nan mòd fòmasyon pasif, terapis la ka mete jiska 60s nan aktivite chak jou kòm trajectoire fòmasyon pasyan an.Sistèm nan kondui pasyan an fè repete, kontinyèl ak stab manipilasyon trajectoire restorasyon fòmasyon dapre trajectoire mouvman an mete ak nan jwèt ak bay sèten eksitasyon sansoryèl.
Pwodui sa a entegre evalyasyon reyabilitasyon, entèraksyon sèn, fòmasyon simulation aktivite lavi chak jou, fòmasyon pwogram entèlijan ak aprantisaj trajèktwa pèsonalize ak fòmasyon, epi li bay evalyasyon fonksyonèl manm anwo ak fòmasyon pou pasyan ki gen malfonksyònman fòs nan misk klas 0-5 akselere pwosesis rekiperasyon an. pasyan yo. AVANTAJ - 1.Li ka reyalize mouvman pasif ak mouvman aktif nan manm anwo yo nan plizyè dimansyon.Pasyan yo ka antrene san fòs nan misk ditou. 2. Ranje mouvman jwenti yo mande pou konplete fòmasyon jwèt la reflete pa valè evalyasyon pasyan an. 3. Avèk mòd aprantisaj trajectoire, aprann ak anrejistre jiska 3 minit nan manipilasyon trajectoire, kondwi pasyan yo fè fòmasyon terapi restorasyon trajèktwa manipilasyon, epi fè yon gwo kantite fòmasyon reyabilitasyon repetitif pou pasyan bonè amelyore efikasite fòmasyon. 4.Mòd fòmasyon divèsifye pou satisfè bezwen pasyan yo nan divès etap fòmasyon reyabilitasyon. 5.Nan mòd fòmasyon pasif, terapis la ka mete jiska 60s nan aktivite chak jou kòm trajectoire fòmasyon pasyan an.Sistèm nan kondui pasyan an fè repete, kontinyèl ak stab manipilasyon trajectoire restorasyon fòmasyon dapre trajectoire mouvman an mete ak nan jwèt ak bay sèten eksitasyon sansoryèl.
 6.Nan mòd fòmasyon aktif ak pasif, terapis la ka ajiste fòs k ap gide bra robot la nan chak jwenti nan manm anwo pasyan an selon kondisyon pasyan an.An menm tan an, si pasyan an pa ka patisipe aktivman nan fòmasyon an nan 5 segonn, sistèm lan pral otomatikman transfòme nan yon mòd fòmasyon pasif pou kondwi pasyan an pou konplete fòmasyon an. 7.Nan mòd fòmasyon aktif la, pasyan an ka kondwi bra mekanik la pou avanse pou pi nan nenpòt direksyon.Mòd fòmasyon an gen ladan fòmasyon sèl jwenti ak fòmasyon milti-jwenti. 8.Fikse trajectoire yo souvan itilize pou fòmasyon manm anwo yo ak trajectoire mouvman lavi chak jou pou pasyan yo antrene byen vit. 9.Bonjan pwoteksyon sekirite, siveyans spasm endepandan, epi tou li gen de bouton pou sispann ijans.Anplis de sa, sistèm nan lojisyèl kontwole limit la nan ranje mouvman bra robot la an tan reyèl pandan aktivite a, konplètman pwoteje sekirite pasyan yo.
6.Nan mòd fòmasyon aktif ak pasif, terapis la ka ajiste fòs k ap gide bra robot la nan chak jwenti nan manm anwo pasyan an selon kondisyon pasyan an.An menm tan an, si pasyan an pa ka patisipe aktivman nan fòmasyon an nan 5 segonn, sistèm lan pral otomatikman transfòme nan yon mòd fòmasyon pasif pou kondwi pasyan an pou konplete fòmasyon an. 7.Nan mòd fòmasyon aktif la, pasyan an ka kondwi bra mekanik la pou avanse pou pi nan nenpòt direksyon.Mòd fòmasyon an gen ladan fòmasyon sèl jwenti ak fòmasyon milti-jwenti. 8.Fikse trajectoire yo souvan itilize pou fòmasyon manm anwo yo ak trajectoire mouvman lavi chak jou pou pasyan yo antrene byen vit. 9.Bonjan pwoteksyon sekirite, siveyans spasm endepandan, epi tou li gen de bouton pou sispann ijans.Anplis de sa, sistèm nan lojisyèl kontwole limit la nan ranje mouvman bra robot la an tan reyèl pandan aktivite a, konplètman pwoteje sekirite pasyan yo. 10.Chanjman otomatik ant bò gòch ak bò dwat, diminye operasyon ankonbran.An menm tan an, aliyman lazè ka ede terapis la fè aliman pozisyon egzèsis ki apwopriye a.11.Restorasyon otomatik la, apre fòmasyon an fini, klike sou bouton retabli otomatik la pou retounen nan pozisyon inisyal la.Premye vèsyon an: https://www.yikangmedical.com/arm-rehabilitation-assessment-robotics.html
10.Chanjman otomatik ant bò gòch ak bò dwat, diminye operasyon ankonbran.An menm tan an, aliyman lazè ka ede terapis la fè aliman pozisyon egzèsis ki apwopriye a.11.Restorasyon otomatik la, apre fòmasyon an fini, klike sou bouton retabli otomatik la pou retounen nan pozisyon inisyal la.Premye vèsyon an: https://www.yikangmedical.com/arm-rehabilitation-assessment-robotics.html Plis nouvo pwodwi:Bò kabann anwo ak pi ba limb aktif pasif fòmasyon bisiklèt
Tan poste: Jan-30-2024 






 6.Nan mòd fòmasyon aktif ak pasif, terapis la ka ajiste fòs k ap gide bra robot la nan chak jwenti nan manm anwo pasyan an selon kondisyon pasyan an.An menm tan an, si pasyan an pa ka patisipe aktivman nan fòmasyon an nan 5 segonn, sistèm lan pral otomatikman transfòme nan yon mòd fòmasyon pasif pou kondwi pasyan an pou konplete fòmasyon an.
6.Nan mòd fòmasyon aktif ak pasif, terapis la ka ajiste fòs k ap gide bra robot la nan chak jwenti nan manm anwo pasyan an selon kondisyon pasyan an.An menm tan an, si pasyan an pa ka patisipe aktivman nan fòmasyon an nan 5 segonn, sistèm lan pral otomatikman transfòme nan yon mòd fòmasyon pasif pou kondwi pasyan an pou konplete fòmasyon an. 10.Chanjman otomatik ant bò gòch ak bò dwat, diminye operasyon ankonbran.An menm tan an, aliyman lazè ka ede terapis la fè aliman pozisyon egzèsis ki apwopriye a.11.Restorasyon otomatik la, apre fòmasyon an fini, klike sou bouton retabli otomatik la pou retounen nan pozisyon inisyal la.Premye vèsyon an: https://www.yikangmedical.com/arm-rehabilitation-assessment-robotics.html
10.Chanjman otomatik ant bò gòch ak bò dwat, diminye operasyon ankonbran.An menm tan an, aliyman lazè ka ede terapis la fè aliman pozisyon egzèsis ki apwopriye a.11.Restorasyon otomatik la, apre fòmasyon an fini, klike sou bouton retabli otomatik la pou retounen nan pozisyon inisyal la.Premye vèsyon an: https://www.yikangmedical.com/arm-rehabilitation-assessment-robotics.html