






Ta rehabilitációs medicina fejlődése ugrásszerűen haladt előre az elmúlt 30 évben.A modern rehabilitációs elmélet folyamatosan fejlődik, és folyamatosan fejlődnek a rehabilitációs megelőzés, értékelés és kezelés technológiái is.A kapcsolódó fogalmak fokozatosan behatolnak a különböző klinikai tudományokba, sőt az emberek mindennapi életébe is.A népesség elöregedésének tendenciája világszerte különösen tovább növeli a rehabilitáció iránti igényt.Az ember társadalmi és mindennapi életében való részvételének és kiteljesedésének fontos funkciójaként a kézműködés is nagy figyelmet kapott annak diszfunkciójára és a kapcsolódó rehabilitációra.
TA különböző okok miatti kézműködési zavarok száma növekszik, a hatékony kézműködés helyreállítása pedig a betegek társadalomba való visszatérésének alapja.A kézműködési zavarok fő klinikailag releváns betegségei három fő kategóriába sorolhatók.Az első a trauma által okozott betegségek, mint például a gyakori törések, ínsérülések, égési sérülések és egyéb betegségek;a második az ízületi gyulladás, az ínhüvely-gyulladás, a myofascialis fájdalom szindróma és más gyulladás által okozott betegségek;Vannak olyan speciális betegségek is, mint a veleszületett felső végtagi rendellenességek, neuromuszkuláris szabályozási zavarok, cukorbetegség okozta idegkárosodás, primer myopathia vagy izomsorvadás.Ezért a kézműködés rehabilitációja fontos része a test általános rehabilitációjának.
TA kézműködés-rehabilitáció alapelve, hogy a kéz vagy a felső végtagi betegségek vagy sérülések által okozott motoros működési zavarait lehetőség szerint helyreállítsuk.A kéz rehabilitációjához ortopéd orvosokból, PT terapeutákból, OT terapeutákból, pszichoterapeutákból és ortopéd eszközmérnökökből álló professzionális kezelőcsoport együttműködésére van szükség.Egy professzionális kezelőcsoport sokféle lelki, szociális és foglalkozási támogatást tud nyújtani a betegeknek, amelyek a hatékony gyógyulás és a társadalmi visszailleszkedés alapját képezik.
SA statisztika azt mutatja, hogy a hagyományos kezeléssel a betegek mindössze 15%-a tudja visszaállítani kézműködésének 50%-át stroke után, és csak a betegek 3%-a tudja visszaállítani eredeti kézműködésének több mint 70%-át.A hatékonyabb rehabilitációs kezelési módszerek feltárása a páciens kézműködésének javítása érdekében a rehabilitáció heves témává vált a rehabilitáció területén.Jelenleg a főként feladatorientált edzésre koncentráló kézműködés-rehabilitációs robotok fokozatosan a kézfunkció-rehabilitáció nélkülözhetetlen rehabilitációs kezelési technológiájává váltak, új ötleteket hozva a kézműködés stroke utáni rehabilitációjához.
A kézfunkciós rehabilitációs robotegy aktívan vezérelt mechanikus hajtásrendszer, amely emberi kézre van rögzítve.5 ujjrészből és egy tenyértámasztó platformból áll.Az ujjak alkatrészei 4 sávos összekötő mechanizmust alkalmaznak, és mindegyik ujjelemet egy független miniatűr lineáris motor hajtja meg, amely képes az egyes ujjak hajlítására és nyújtására.A mechanikus kéz kesztyűvel van rögzítve a kézhez.Szinkron mozgásra készteti az ujjakat, az ujjak és a robot exoskeleton pedig kölcsönösen érzékelhetők és interaktívan vezérelhetők a rehabilitáció értékelése és képzése során.Először is, segítséget nyújthat a betegeknek az ismétlődő ujj-rehabilitációs tréningben.E folyamat során a kéz külső váza különböző vezérlési módokon keresztül képes az ujjakat különböző szabadságfokú mozgásokra hajtani, hogy elérje a rehabilitációs edzés célját.Ezenkívül képes összegyűjteni az egészséges kéz elektromos jeleit, amikor az mozgásban van.Az elektromos vezérlőrendszer mozgásmintázat-felismerésén keresztül képes elemezni az egészséges kéz gesztusait, és az exoskeletont meghajtani, hogy segítse az érintett kezet ugyanazon mozgás végrehajtásában, hogy megvalósítsa. a kezek szinkronizálása és szimmetria edzése.
In kezelési módszerek és hatások tekintetében a kézrehabilitációs robotképzés jelentősen eltér a hagyományos rehabilitációs tréningtől.A hagyományos rehabilitációs terápia elsősorban az érintett végtagok passzív tevékenységeire összpontosít a petyhüdt bénulás időszakában, aminek olyan hiányosságai vannak, mint a betegek alacsony aktív részvétele és monoton edzésmód.A kézi exoskeleton robot segíti a kétoldali szimmetria tréninget és a tükörterápiás rehabilitációs tréninget.A látás, a tapintás és a propriocepció pozitív visszacsatolásának integrálásával a páciens aktív motoros irányító képessége erősíthető az edzési folyamat során.A páciens kézfunkciós rehabilitációban való aktív részvételét előrehozva a petyhüdt időszakra, a kezelésben megvalósítható a motoros szándék, a motoros végrehajtás és a motoros érzékelés szinkronizálása, ismételt stimulációval, pozitív visszajelzéssel pedig teljes mértékben aktiválható a központ.Ez egy hatékony kézműködés-rehabilitációs tréning módszer a hemiplegiára.Ez az összetett rehabilitációs kezelési módszer jelentősen felgyorsíthatja a kézműködés helyreállítási folyamatát stroke-betegeknél, és kiemelkedő előnyök a kézműködés stroke utáni rehabilitációjában.
TA kézfunkciós rehabilitációs robotrendszer a rehabilitációs medicina elméletére épül, és számos jellemzővel bír a rehabilitációs kezelési előírásokban.A kezelési folyamat során a rendszer valós időben szimulálja a kézmozgás törvényeit.Az egyes ujjak független meghajtó érzékelőjén keresztül számos edzést tud megvalósítani különböző célokra, például egyujjas, többujjas, teljes ujjas, csukló, ujj és csukló stb., így a kézfunkciók precíz vezérlése megvalósuljon.Ezen túlmenően az EMG jel pontos kiértékelése történik különböző izomerősségű betegeknél, hogy a páciens számára célzott edzésmódszert válasszon.Az értékelési adatok és a képzési adatok rögzíthetők tárolás és elemzés céljából, valamint a rendszer internetre csatlakoztatható a valós idejű 5G orvosi összekapcsoláshoz.A rendszer számos edzésmóddal is fel van szerelve, mint például passzív edzés, aktív-passzív edzés, aktív edzés, és a megfelelő edzés a páciensek különböző izomereje szerint választható ki.


Az eredeti hüvelykujj EMG kiértékelés és a négyujjas EMG kiértékelés egy módja annak, hogy megkapjuk a páciens biológiai testalkati jelét, elemezzük a fizikum jel által képviselt mozgási szándékot, majd az exoskeleton rehabilitációs kéz vezérlését befejezve a rehabilitációs tréning megvalósításához.
Az izomösszehúzódások által generált potenciális változásokat a testfelszínről érzékelik, majd a jelerősítést és a zajjel kiszűrését célzó szűrést követően a digitális jeleket átalakítják, bemutatják és rögzítik a számítógépben.
A felületi EMG jel jellemzői a jó valós idejű teljesítmény, az erős bionika jelleg, a kényelmes kezelés és a könnyű vezérlés, ami azt jelenti, hogy az emberi test felszíni EMG-je alapján képes megítélni a végtagok mozgási módját.
ASzámos klinikai kísérlet szerint ez a termék elsősorban idegrendszeri károsodások, például stroke (agyi infarktus, agyvérzés) okozta kézműködési zavarok rehabilitációs kezelésére alkalmazható.Minél korábban kezdi a beteg Az A5-ös rendszerrel végzett edzés, annál jobb a funkcionális helyreállító hatás.A kutatási eredmények egy része az alábbi ábrán látható.
(1. kép: klinikai vizsgálat címeAz EMG által kiváltott robotkéz hatása a korai stroke-os betegek kézfunkcióinak rehabilitációjára)
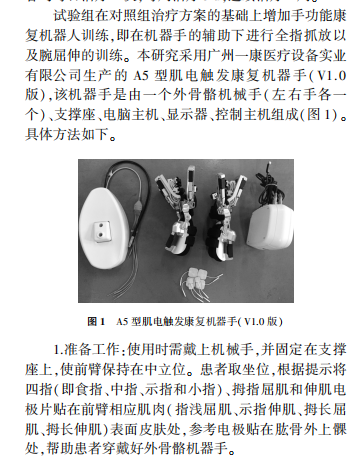
(2. kép: Yeecon Hand Rehabilitation System A5-öt használtak a klinikai vizsgálathoz)
A vizsgálatok eredményei azt mutatják, hogy az elektromiográfiával kiváltott rehabilitációs robotkéz javíthatja a stroke-betegek kézmotoros funkcióját.Bizonyos referencia jelentőséggel bír a korai stroke betegek kézműködésének rehabilitációjában.
Vállalati profil
GuangzhouYikang MedicalAz Equipment Industrial Co., Ltd. 2000-ben alakult. Csúcstechnológiás vállalkozás, magas színvonalú intelligens rehabilitációs orvosi szolgáltató, amely integrálja a kutatás-fejlesztést, a gyártást, az értékesítést és az értékesítés utáni szolgáltatásokat.A „segítség a betegeknek boldog élethez” küldetésével és az „intelligencia megkönnyíti a rehabilitációt” elképzelésével a Yikang Medical eltökélt szándéka, hogy vezető szerepet töltsön be az intelligens rehabilitáció területén Kínában, és hozzájáruljon az anyaország rehabilitációs iparához.
2000-es megalakulása óta a Yikang Medical 20 év hullámvölgyön ment keresztül.2006-ban megalapította aK+Fközpont, amely a csúcskategóriás rehabilitációs termékek kutatására és fejlesztésére összpontosít.2008-ban a Yikang Medical volt az első vállalat, amely Kínában javasolta az intelligens rehabilitáció koncepcióját.Ez egy új korszak a hazai intelligens rehabilitációs termékek fejlesztésében, és ugyanebben az évben Kínában piacra dobta az első intelligens rehabilitációs robot A1-et.Azóta számosAsorozatú intelligens rehabilitációs termékek.2013-ban a Yikang Medical nemzeti csúcstechnológiai vállalkozásként és a hagyományos kínai orvoslás diagnosztikai és kezelési berendezéseinek gyártására szolgáló nemzeti bemutató bázis építőegységeként szerepelt.2018-ban a Kínai Rehabilitációs Orvostudományi Társaság vezető tagjaként és a CARM Rehabilitációs Robot Szövetség szponzoraként értékelték.2019-ben a Yikang elnyerte a National Science and Technology Progress Award második díját, részt vett három kulcsfontosságú nemzeti tudományos kutatási projektben, valamint részt vett a 13. ötéves terv kötelező tantervének összeállításában.
2020. január 10-én a Kínai Népköztársaság elnökeÚr.Hszi Csin-ping díjat adott át a Yikang Medicalnak, a Fujian Hagyományos Kínai Orvostudományi Egyetemnek, a Hongkongi Politechnikai Egyetemnek és más egységeknek az integrált hagyományos kínai és nyugati orvoslás rehabilitációjának kulcsfontosságú technológiájával és klinikai alkalmazásával a stroke utáni diszfunkciók kezelésére a Nagyteremben. Emberek.
A Yikang Medical hű marad az eredeti törekvéshez, mindig szem előtt tartja felelősségét az intelligens rehabilitáció vezető vállalataként, és három kulcsfontosságú nemzeti K+F projektet vállal a „Proaktív egészség és öregedés technológiai válasz” speciális projekt keretében, amelyek magukban foglalják a hangképzést és a beszéddiszfunkció rehabilitációs tréningjét. rendszer, végtagmotoros diszfunkció rehabilitációs tréningrendszer és emberi gerincvelő-sérülés robot.

Olvass tovább:
A korai kézrehabilitáció szükségessége
Kézfunkciók képzési és értékelési rendszere
Feladás időpontja: 2022. június 21