







Bevezetés
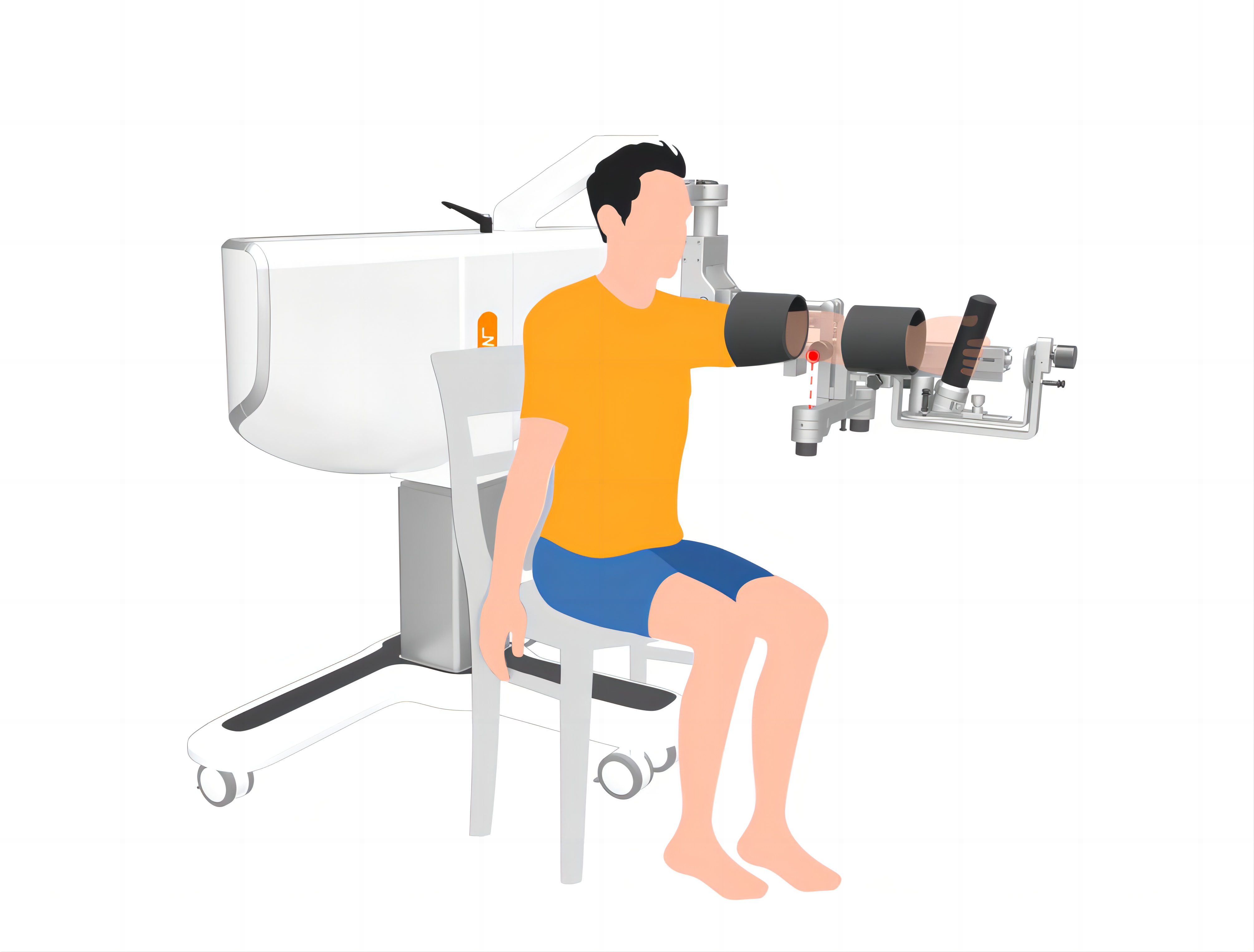
A felső végtag-rehabilitációs robot számítógépes virtuális technológiát alkalmaz a rehabilitációs medicina elméletével kombinálva, hogy valós időben szimulálja az emberi felső végtagok mozgási szabályait, és a páciensek számítógépes virtuális környezetben végezhetik el a többízületes vagy egyízületi rehabilitációs tréninget.
A rendszer rendelkezik felsőtest súlycsökkentő edzéssel, intelligens visszajelzéssel, többdimenziós tértréninggel és hatékony kiértékelő rendszerrel.Elsősorban szélütés, cerebrovaszkuláris malformáció, súlyos agyi trauma vagy egyéb neurológiai megbetegedés miatt fellépő felső végtag diszfunkcióban szenvedőknek, illetve műtét után helyreállt felső végtagfunkciójú betegeknek alkalmas.

Terápiás hatás
Elősegíti az elszigetelt mozgás kialakulását
Stimulálja a maradék izomerőt
Növelje az izom állóképességét
Állítsa vissza az ízületi koordinációt
Az ízületek rugalmasságának helyreállítása
A felsőtest motorvezérlésének erősítése
Erős kapcsolat az ADL-lel
A felső végtag működésének helyreállítása
Jellemzők
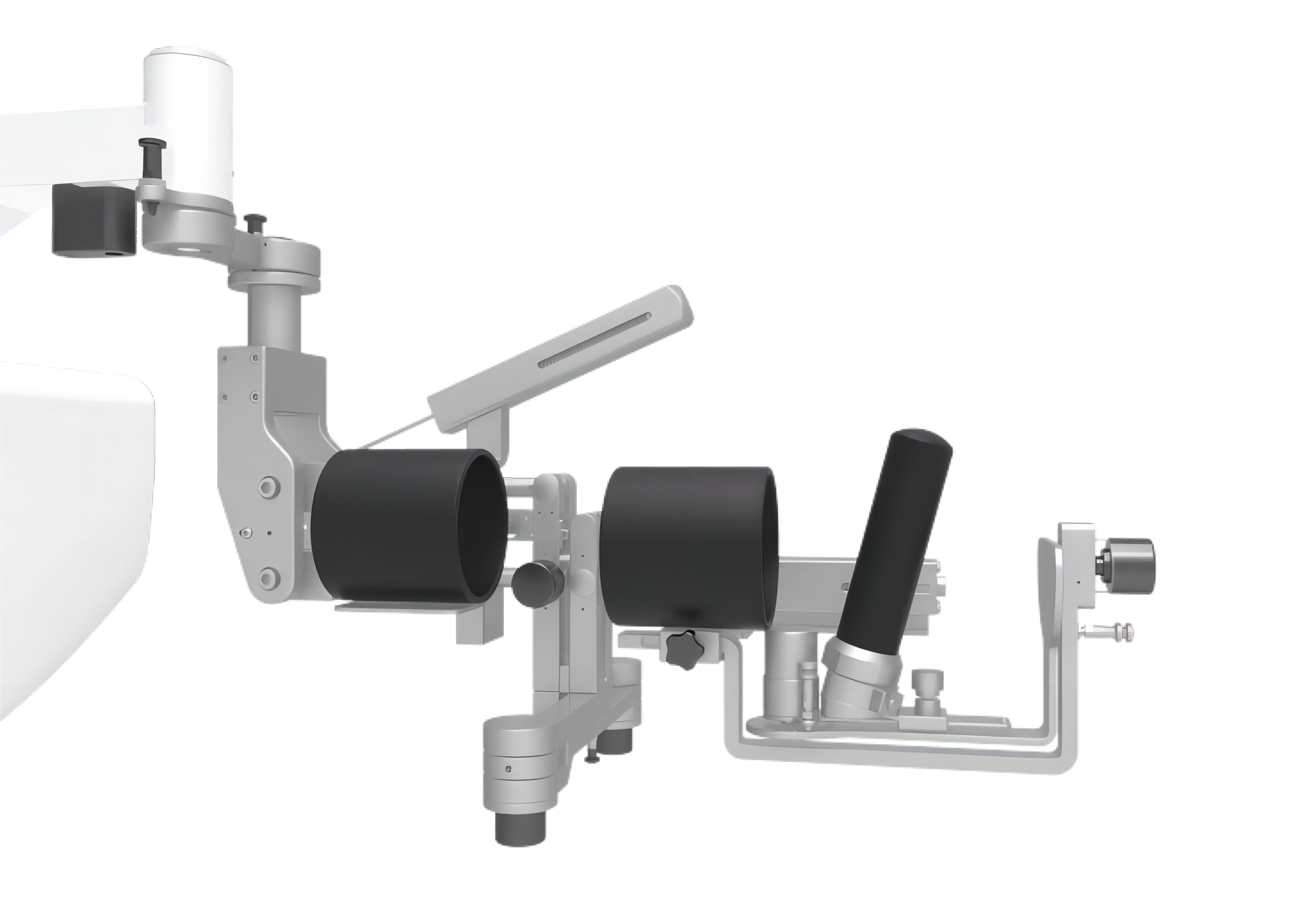
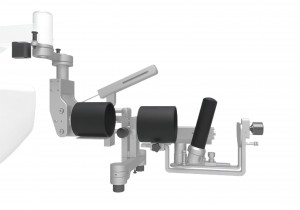
1. jellemző: Exoskeletonnal burkolt szerkezet
ízületi támaszvédelem
elősegíti az elválasztó mozgást
Továbbfejlesztett egyetlen közös vezérlés
Külön állítható alkar és felkar ellenállás
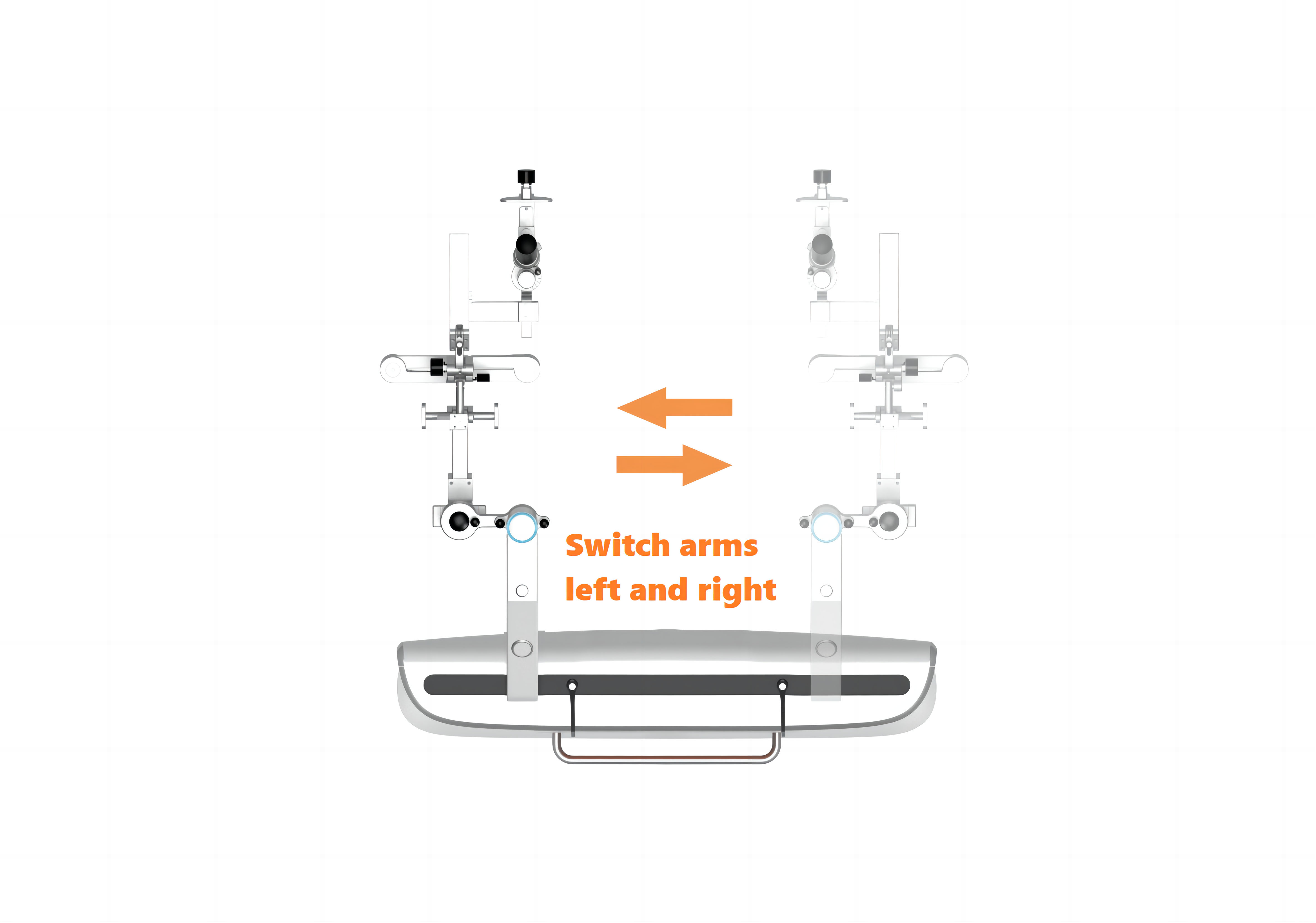
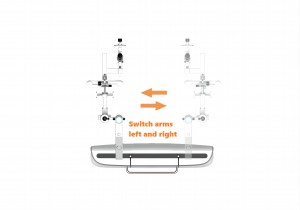
2. jellemző: Integrált karcsere kialakítás
Könnyebb a karcsere
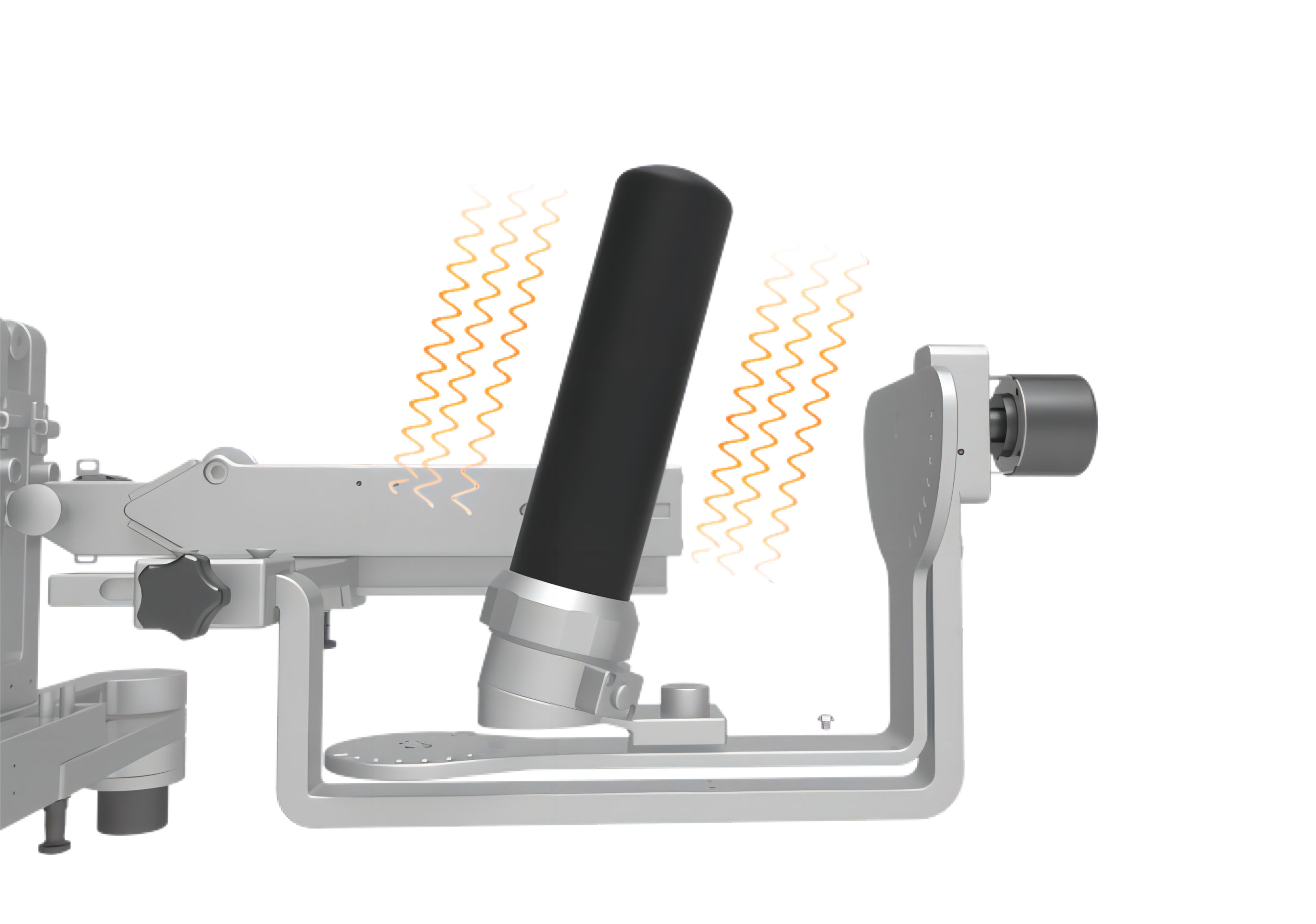
3. szolgáltatás: Beépített lézeres lokátor
Az ízületi pozíció pontos pozicionálása a biztonságos és hatékony kezelés érdekében

4. funkció: kézfogás + vibrációs visszacsatolás stimuláció
Valós idejű visszajelzés a fogás erejéről
Értékelje a vibrációs riasztásokat edzés közben

5. jellemző: Egyetlen ízület pontos értékelése
6. szolgáltatás: 29 jelenet interakció
Jelenleg 29 féle nem ismétlődő edzésprogram létezik, amelyeket folyamatosan frissítünk és bővítünk.
7. szolgáltatás: Adatelemzés
Hisztogram, vonaldiagram adatösszesítő megjelenítés
Bármely két értékelési tréning eredményének összehasonlítása





