












Համատեղելով տարիների խելացի վերականգնողական տեխնոլոգիան և կլինիկական փորձը վերականգնողական արդյունաբերության վերջին միտումների հետ՝ Յիկանգը մշակել է ստորին վերջույթների հետադարձ կապի և մարզման A1-3 խելացի համակարգը:
ԱՊՐԱՆՔԻ ՆԵՐԱԾՈՒԹՅՈՒՆ
Ռոբոտային թեքված աղյուսակը A1-3 օգտագործում է վերականգնողական նոր հայեցակարգ՝ ավանդական վերականգնողական մարզումների թերությունները հաղթահարելու համար:Թեք սեղանն օգնում է հիվանդներին քայլելու մարզումներ կատարել:Նորմալ ֆիզիոլոգիական քայլվածքը նմանակելով՝ այս սարքավորումն օգնում է վերականգնել հիվանդների քայլելու ունակությունը։
A1-3-ը հարմար է նյարդային համակարգի խանգարումներից տառապող հիվանդների վերականգնման համար, որոնք կապված են ինսուլտի կամ ուղեղի տրավմատիկ վնասվածքի կամ ողնուղեղի թերի վնասվածքների հետ:Իսկապես արդյունավետ լուծում է վերականգնողական ռոբոտի օգտագործումը հատկապես վերականգնողական վաղ փուլերում:

Վերականգնողական բուժման առումով գոյություն ունի ստորին վերջույթների մարզման երեք մակարդակ՝ պասիվ տեսարանի փոխազդեցության մարզում, միակողմանի ինդուկտիվ մարզում և այլընտրանքային ինտերակտիվ մարզումներ:Սա ստորին վերջույթների խելացի հետադարձ կապի և մարզման առաջին համակարգն է, որը ստեղծում է առաջադեմ մարզման ուղի:
Շարժման կատարողականի օպտիմիզացում
- Սկսած կլինիկական պրակտիկայից, ուսումնասիրեք ստորին վերջույթների մարզման ավելի լավ մեթոդներ:
- Օրթոստատիկ անկյուն
- Քայլելու շարժման մոդելավորում
- Կարգավորվող մահճակալ
Խելացի տեխնոլոգիաների նորարարություն
- Ոտքի երկարության ավտոմատ կարգավորում. ինքնաբերաբար չափեք հիվանդի ոտքի երկարությունը
- Մեկ կոճակի ոտքի երկարության վերականգնում. Ավտոմատ կերպով վերականգնել հիվանդի ոտքի երկարությունը
- Մեկ կոճակի մահճակալի վերականգնում. ավտոմատ կերպով վերականգնել պատրաստի վիճակի
Վերականգնողական տեխնոլոգիաների առաջընթաց
- Նոր 3D բարձր հստակությամբ վիրտուալ կյանքի տեսարան, ընկղմվող վիրտուալ փորձ
- Ստորին վերջույթների շարժունակության գնահատում, վերապատրաստման և գնահատման ինտեգրում
- Ավտոմատ վերլուծություն և վիճակագրություն, բազմակի վերապատրաստման և գնահատման տվյալների ավտոմատ ամփոփում
- Ստորին վերջույթների շարժիչային մարզումներ՝ զուգորդված մակերեսային մկանների էլեկտրական խթանման հետ (FES)
Ստորին վերջույթների խելացի հետադարձ կապի և մարզման համակարգի մասին A1-3
1.ՇԱՐԺԱՐԺՄԱՆ Օպտիմիզացիա
1.1orthostatic կանգնած 0-90°
Զրոյական մաքրման տեխնոլոգիայի օգտագործումը նվազագույնի է հասցնում մահճակալի ցնցումները կանգնելու ժամանակ՝ հիվանդներին տալով բուժման ավելի հարմարավետ փորձ:

1.2 Իրատեսական քայլելու շարժում, ազդրային հոդի շարժման անկյուն 0-45°
Ստորին վերջույթների հոդերի շարժման լայն շրջանակը կարող է ապահովել ավելի ամբողջական քայլելու մարզման փորձ, այնպես որ ստորին վերջույթների յուրաքանչյուր հոդ կարող է ավելի լայն վարժություններ կատարել:

1.3 0-15° Պառկած մահճակալ
Անընդհատ քայլային մարզումների ժամանակ մեծացրեք պառկած անկյունը՝ ազդրի երկարացման մեջ ներգրավված մկաններն ամբողջությամբ ձգելու համար:

2.ԽԵԼԱՑԻ ՏԵԽՆՈԼՈԳԻԱՅԻ ՆՈՐԱՐԱՐՈՒԹՅՈՒՆ
- Ոտքի երկարության ավտոմատ ճշգրտում
- Ոտքի երկարության ավտոմատ վերականգնում
- Մահճակալի ավտոմատ վերականգնում

3.ՎԵՐԱԿԱՆԳՆՄԱՆ ՏԵԽՆՈԼՈԳԻԱ
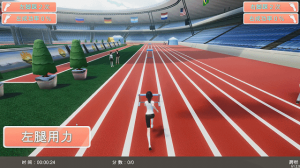
Վիրտուալ ինտերակտիվ ուսուցում:Նոր 3D շարժիչը օգտագործվում է բարձր սիմուլյացիայով վարժությունների տեսարաններ ստեղծելու համար՝ ձևավորելով փոխկապակցվածություն վարժությունների և իրական կյանքի միջև:

Շարժման տիրույթի գնահատում:A1-3-ն առաջինն է, որը ներկայացրել է ստորին վերջույթների ROM-ի գնահատումը խելացի ստորին վերջույթների շարքում:Այն թույլ է տալիս մեզ ցանկացած պահի դիտարկել հիվանդների ստորին վերջույթների շարժունակության առաջընթացը։Ստորին վերջույթների շարժման անկյունը գրանցում է սարքը։Գրառումները համաժամացվում են վերապատրաստման պարամետրերին

Ավտոմատ վիճակագրական վերլուծություն:Ավտոմատ կերպով ամփոփել հիվանդների վերապատրաստման և գնահատման տվյալները տարբեր ժամանակահատվածներում և տեսողականորեն ցուցադրել հիվանդի ֆունկցիոնալ վերականգնումը:

Ինտուիտիվ փոխազդեցության հրահանգներ.Ուժեղ ինտերակտիվ հուշում, Իրականացրեք ժամանակի վերահսկում
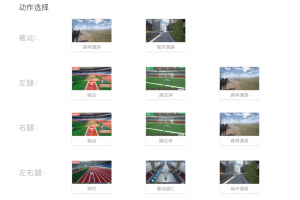
Դիվերսիֆիկացված վերապատրաստման ձևեր.Պասիվ վարժություն, սցենարի մոդելավորում;Ձախ/աջ ոտք, մեկ ոտքի մարզում;Ձախ և աջ ոտքերի միաժամանակյա փոփոխական մարզում
Կյանքի վրա հիմնված ուսուցում.Առօրյա կյանքի սցենարների հիման վրա;Ստեղծեք տեսարաններ, որոնք մեծապես կապված են ստորին վերջույթների շարժման հետ

Ստորին վերջույթների ROM-ի գնահատում
4.ԷՐԳՈՆՈՄԻԿ ԴԻԶԱՅՆ
Ոտքի բարձրացնող ոտնակ: Կոճ-ոտնաթաթի նոր բիոնիկ կառուցվածքը թույլ է տալիս կոճ-ոտնաթաթի շարժումների ավելի լայն տիրույթ՝ նպաստելով կոճի և ոտքի ֆունկցիայի հետագա վերականգնմանը:

Շարժական բազկաթոռ: Մեքենայի թևի կամարաձև ձևավորումը համապատասխանում է մարդու մարմնի թևին և կարող է կայունացնել ձեռքի դիրքը մարզման ընթացքում:Այն պահպանում և կայունացնում է վերին վերջույթների կեցվածքը:

Ոտքերի կարգավորելի տարածություն: Ոտքերի տարածությունը կարող է ճշգրտվել ըստ հիվանդի մարմնի չափի՝ ապահովելու համար, որ հիվանդները մարզվում են հարմարավետ դիրքում:

Ոտքերի կարգավորելի ամրացում: Ոտքի ամրացումը կարող է փոխվել՝ կախված հիվանդի ոտքի երկարությունից՝ հիվանդի մարմնի ձևին հարմարվելու համար:

Մահճակալի պարզեցված ձևավորումհարմարեցնել մարդու մարմնի կորը՝ նվազեցնելով ճնշումը

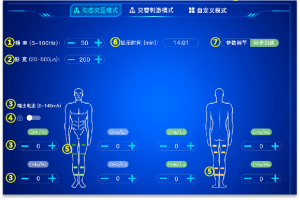
5.EXCLUSIVE FUNCTION:համադրություն մակերեսային միոէլեկտրականության հետ

Ստորին վերջույթների վերականգնողական ռոբոտի կարևորագույն կետերը A1-3.
1. Արտոնագրված մեջքի թեքման տեխնոլոգիա, օգնում է ազդրի երկարացմանը, ավելի մոտ է ֆիզիոլոգիական քայլվածքին, ճնշում է ռեֆլեքսային աննորմալ ձևերը
2. Սպասարկման ավելի բարձր արդյունավետություն. ոտքի երկարության բացառիկ ավտոմատ ճշգրտում և մեկ բանալիով վերակայման գործառույթներ
3. Վիզուալացված վերապատրաստման գործընթաց. համատեղ գործունեության բացառիկ գնահատում իրական ժամանակի ցուցադրման գործառույթ
4. Անվտանգ և հարմարավետ. ձեռքի հանգստի էրգոնոմիկ ձևավորում՝ ուսի տեղահանումը կանխելու համար
5. Կարգավորելի ոտքերի և կոճերի տարածություն՝ անհատականացված մարզումների կարգավորումների համար
6. Մակերեւութային էլեկտրամիոգրաֆիայի հետ համակցում. քայլելու և էլեկտրական խթանման համատեղում քայլվածքի ֆունկցիան վերականգնելու համար





