






Tリハビリテーション医学の開発は、過去 30 年間で飛躍的に進歩しました。現代のリハビリテーション理論は常に改良されており、リハビリテーションの予防、評価、治療の技術も常に改善されています。関連する概念は、さまざまな臨床分野、さらには人々の日常生活に徐々に浸透していきます。特に世界中で人口が高齢化する傾向にあり、リハビリテーションの需要がさらに高まっています。人間が社会生活や日常生活に参加し、完了するための重要な機能として、手の機能はその機能不全や関連するリハビリテーションにも多くの注目を集めています。
Tさまざまな原因で手の機能障害を起こす患者は増加しており、効果的な手の機能回復は患者の社会復帰の基礎となる。手の機能不全に臨床的に関連する主な疾患は、3 つの主要なカテゴリーに分類されます。1 つ目は、一般的な骨折、腱損傷、火傷、その他の疾患などの外傷によって引き起こされる疾患です。2つ目は、関節の炎症、腱鞘の炎症、筋筋膜性疼痛症候群、および炎症によって引き起こされるその他の疾患です。先天性上肢欠損、神経筋制御障害、糖尿病による神経損傷、原発性ミオパチー、筋萎縮などの特殊な病気もあります。したがって、手の機能のリハビリテーションは、身体全体のリハビリテーションの重要な部分です。
T手機能リハビリテーションの原理は、病気や怪我によって生じた手や上肢の運動機能障害を可能な限り回復させることです。手のリハビリテーションには、整形外科医、PT セラピスト、OT セラピスト、心理療法士、整形外科用機器エンジニアで構成される専門の治療チームの協力が必要です。専門の治療チームは、効果的な回復と社会復帰の基礎となる、精神的、社会的、職業上のさまざまなサポートを患者に提供できます。
S統計によると、従来の治療では、脳卒中後に手の機能の 50% を回復できる患者はわずか約 15%、元の手の機能の 70% 以上を回復できる患者はわずか 3% です。患者の手の機能を改善するためのより効果的なリハビリテーション治療法の探索は、リハビリテーション分野で熱い話題となっています。現在、課題指向訓練を中心とした手機能リハビリテーションロボットは、手機能リハビリテーションに欠かせないリハビリテーション治療技術となりつつあり、脳卒中後の手機能リハビリテーションに新たな発想をもたらしています。
手の機能リハビリテーションロボット人間の手に固定されたアクティブに制御される機械駆動システムです。5 本の指のコンポーネントと手のひらをサポートするプラットフォームで構成されます。フィンガーコンポーネントは4バーリンク機構を採用しており、各フィンガーコンポーネントは独立した小型リニアモーターによって駆動され、各フィンガーの屈曲と伸展を駆動できます。メカニカルハンドは手袋で手に固定されています。指を同期して動かすことができ、指とロボット外骨格はリハビリテーションの評価と訓練の過程で相互に認識され、インタラクティブに制御されます。まず、患者の指のリハビリテーショントレーニングを繰り返し支援できます。このプロセス中、手の外骨格は、リハビリテーショントレーニングの目的を達成するために、さまざまな制御モードを通じて指を駆動してさまざまな自由度の動きを完了させることができます。さらに、健康な手が動いているときの電気信号を収集することもできます。電気制御システムの動作パターン認識を通じて、健康な手のジェスチャーを分析し、外骨格を駆動して罹患した手が同じ動作を完了できるように支援し、次のことを実現します。 手の同期と対称性のトレーニング。
Iハンドリハビリテーションロボットトレーニングは、治療方法や効果の点で従来のリハビリテーショントレーニングとは大きく異なります。従来のリハビリテーション療法は、弛緩性麻痺期における患肢の受動的な活動が中心であり、患者の積極的な参加が少なく、訓練モードが単調になるなどの欠点がありました。ハンド外骨格ロボットは、左右対称トレーニングやミラーセラピーのリハビリテーショントレーニングを支援します。視覚、触覚、固有受容のポジティブなフィードバックを統合することにより、トレーニングプロセス中に患者の能動的運動制御能力を強化できます。患者の手機能リハビリテーションへの積極的な参加を弛緩期まで前進させ、治療において運動意図、運動実行、運動感覚の同期を実現し、繰り返しの刺激と正のフィードバックを通じて中枢を完全に活性化することができます。片麻痺に対する効率的な手の機能リハビリテーション訓練法です。この複合リハビリテーション治療法は、 脳卒中患者の手の機能の回復プロセスを大幅に加速することができ、顕著な効果をもたらします。 脳卒中後の手の機能のリハビリテーションに利点があります。
T手機能リハビリテーションロボットシステムは、リハビリテーション医学の理論に基づいて開発されており、リハビリテーション治療の処方に多くの特徴を持っています。治療プロセス中、システムは手の動きの法則をリアルタイムでシミュレートします。各指の独立した駆動センサーにより、単指、複数指、全指、手首、指と手首など、目的に応じたさまざまなトレーニングを実現し、手の機能を正確に制御できます。実現する。また、筋力の異なる患者に対して筋電図信号を正確に評価し、患者に合わせたトレーニング方法を選択します。評価データとトレーニングデータは保存と分析のために記録でき、システムはインターネットに接続してリアルタイムの5G医療相互接続が可能です。また、パッシブトレーニング、アクティブ-パッシブトレーニング、アクティブトレーニングなどの多彩なトレーニングモードを搭載しており、患者の筋力の違いに応じて対応するトレーニングを選択することができます。


オリジナルの親指筋電図評価と四指筋電図評価は、患者の生物学的体格信号を取得し、体格信号によって表される運動意図を分析し、外骨格リハビリテーションハンドの制御を完了してリハビリテーショントレーニングを実現するための1つの方法です。
筋肉の収縮によって生じる電位変化を体表面から検出し、信号の増幅とノイズ信号を除去するフィルタリングを行った後、デジタル信号に変換されてコンピュータに表示、記録されます。
表面筋電図信号は、優れたリアルタイム性能、強力なバイオニクス特性、便利な操作、簡単な制御という特徴を備えており、人体の表面筋電図に応じて手足の運動モードを判断できます。
A多くの臨床実験によると、この製品は主に脳卒中(脳梗塞、脳出血)などの神経系損傷による手の機能障害のリハビリテーション治療に応用できます。患者の治療開始が早ければ早いほど A5システムでトレーニングを行うほど、より高い機能回復効果が得られます。研究結果の一部を下図に示します。
(写真1:臨床研究のタイトル早期脳卒中患者におけるEMG誘発ロボットハンドオンハンド機能リハビリテーションの効果)
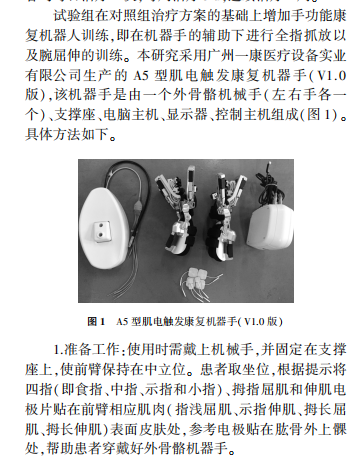
(写真2: YeeconハンドリハビリテーションシステムA5を臨床研究に使用)
これらの研究の結果は、筋電図をトリガーとするリハビリ用ロボットハンドが脳卒中患者の手の運動機能を改善できることを示しています。これは、初期の脳卒中患者の手の機能のリハビリテーションにとって、ある種の参考となる重要性を持っています。
会社概要
広州宜康医療設備工業株式会社は2000年に設立され、研究開発、生産、販売、アフターサービスを統合したハイテク企業であり、高品質のインテリジェントリハビリテーション医療サービスプロバイダーです。「患者の幸せな生活の実現を支援する」という使命と「インテリジェンスによりリハビリテーションが容易になる」というビジョンを掲げ、宜康医科は中国のインテリジェントリハビリテーション分野のリーダーとなり、祖国のリハビリテーション産業に貢献することを決意している。
宜康医療は2000年の設立以来、20年間の浮き沈みを経験してきました。2006 年に設立されました。研究開発ハイエンドのリハビリテーション製品の研究開発に重点を置いています。2008 年、Yikang Medical は中国でインテリジェントなリハビリテーションの概念を提案した最初の企業でした。これは国内のインテリジェントリハビリテーション製品開発の新時代であり、同年、中国初のインテリジェントリハビリテーションロボットA1を発売しました。以来、数々の商品を発売してきましたが、Aシリーズのインテリジェントなリハビリテーション製品。2013年、宜康医療は国家ハイテク企業および伝統的な中国医学の診断および治療機器の生産のための国家実証基地の建設単位として評価されました。2018年には、中国リハビリテーション医学会の上級会員ユニットおよびCARMリハビリテーションロボットアライアンスのスポンサーとして評価されました。2019年、宜康は国家科学技術進歩賞の二等賞を受賞し、3つの国家重点科学研究プロジェクトに参加し、第13次5カ年計画の必修科目の編纂に参加した。
2020年1月10日、中華人民共和国国家主席は、氏習近平国家主席は、大広間で脳卒中後の機能障害に対する伝統的な中国医学と西洋医学を統合したリハビリテーションの主要技術と臨床応用プロジェクトに関する宜康医科大学、福建中医薬大学、香港理工大学およびその他の部門に賞を授与した。人々。
宜康医科は当初の志を忠実に守り、インテリジェントリハビリテーションのリーディング企業としての責任を常に念頭に置き、「積極的な健康と老化技術への対応」特別プロジェクトにおいて、発声と言語機能障害のリハビリテーション訓練を含む3つの国家重点研究開発プロジェクトに取り組んでいる。システム、四肢運動機能障害リハビリテーショントレーニングシステム、ヒト脊髄損傷ロボット。

続きを読む:
投稿日時: 2022 年 6 月 21 日