







Introductio
Rehabilitatio membri superioris robot technologiam virtualem computatrum adoptat, cum theoria rehabilitationis medicae coniungitur, simulare regulas motus humanorum membrorum superiorum in tempore reali, et aegroti multi-iunctionem vel unicam coniunctionem rehabilitationis disciplinae virtualis in ambitu computantes possunt perficere.
Systema etiam superius corpus pondus reductionem disciplinae, opiniones intelligentes, multi-dimensionis spatium disciplinae et aestimationis ratio potens habet.Maxime convenit aegris membri superioris distemperantia ab ictu, malformatione cerebrovasculari, gravi trauma cerebro vel aliis morbis neurologicis vel aegris qui post surgery functionem membri superioris recuperaverunt.

Effectus therapeuticus
Promovere ad solitariam institutionem motus
RELICTUM musculus vires incitare
Patientia augendae musculus
Restitue iuncturam coordinationem
Restitue iuncturam flexibilitate
Confortare superius corpus motoris imperium
Fortis societas cum ADL
Recuperatio functionis membri superioris
Features
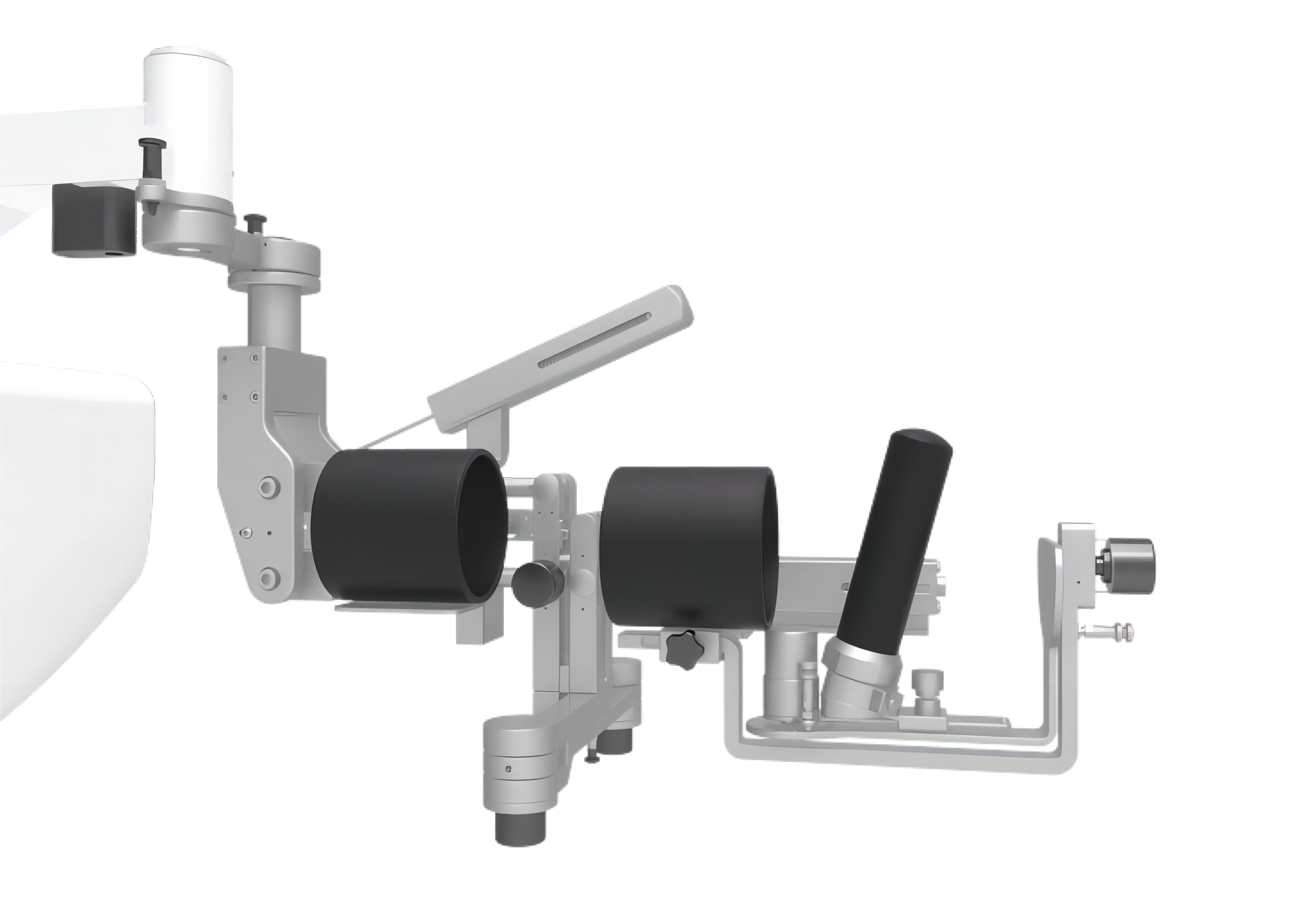
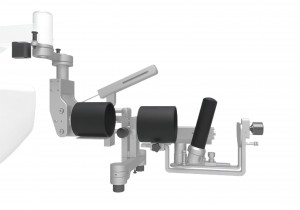
Pluma I: Exoskeleton involvit compages
iuncturam auxilium praesidium
promovere separationem motus
Consectetur uno iuncturam imperium
Separatim Novifacta brachii et brachii resistentia
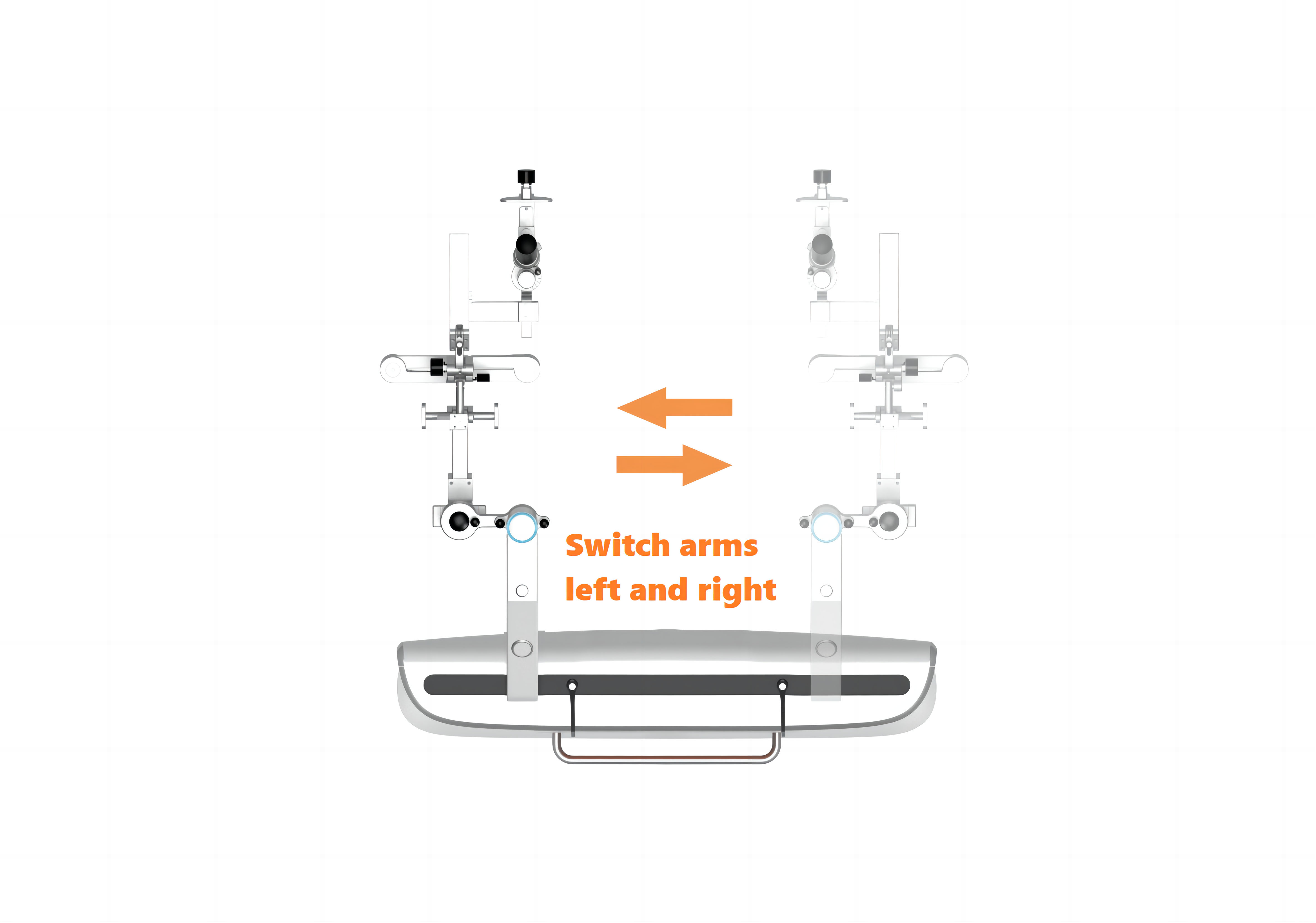
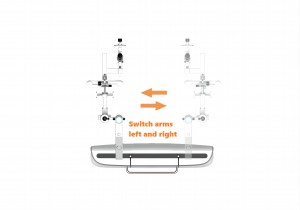
Pluma II: Integrated bracchium mutatio design
Facilius mutare arma
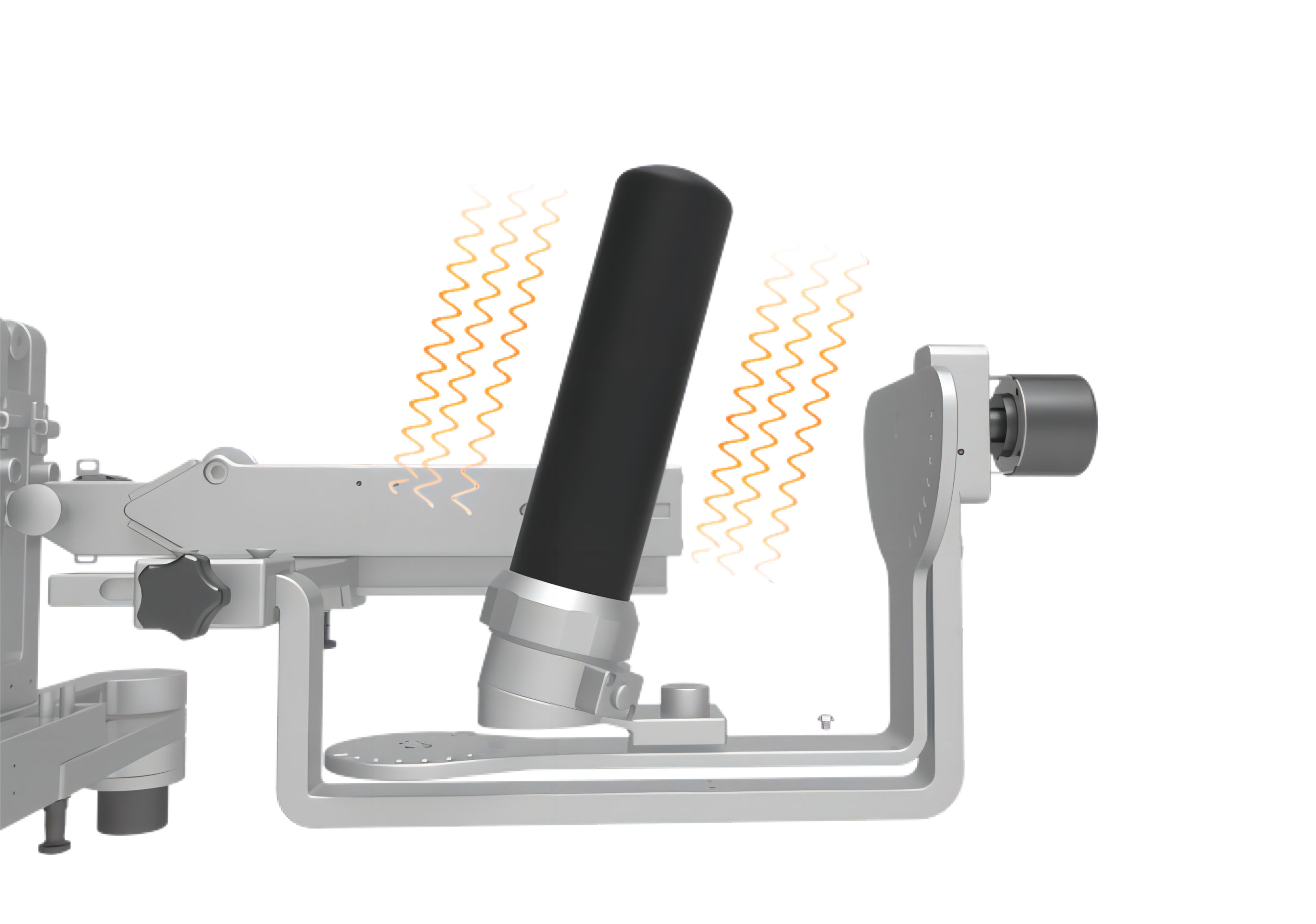
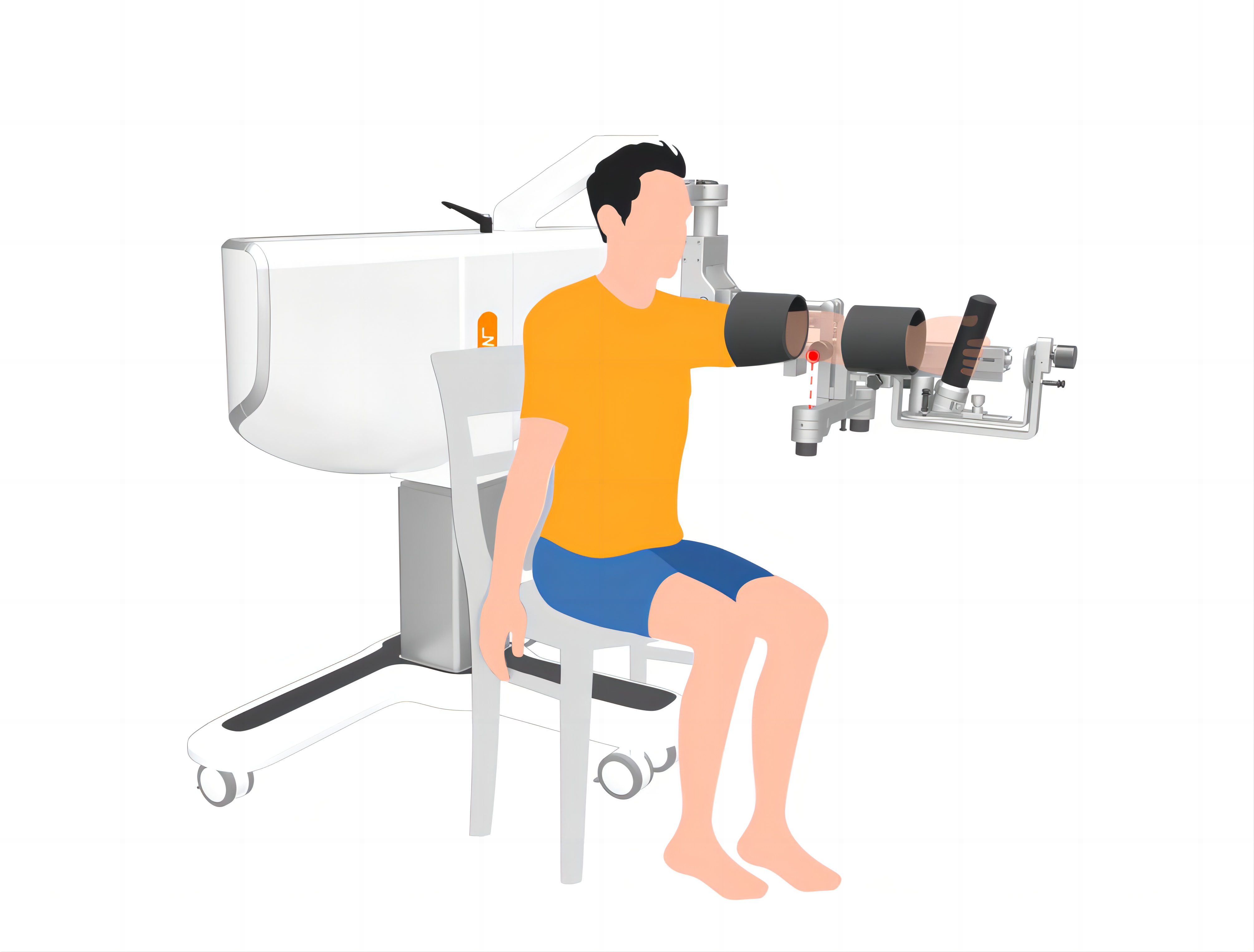
Pluma III, inaedificata laser locator
Accurate positioning of the joint position to ensure safe and efficient treatment

Pluma 4: manus tenaci + tremor feedback excitanda
Real-time feedback in tenaci viribus
Aestimare tremula summis in disciplina

Pluma V: Accurate iudicium unius iuncturam
Pluma 6: 29 scena interactiones
In praesenti programmata ludorum non repetitivorum 29 genera sunt, quae continenter renovantur et adduntur
Pluma 7: Data Analysis
Histogram, line graph data summarium propono
Comparatio cuiuslibet duorum proventuum disciplinae aestimandi





