






Trehabilitācijas medicīnas attīstība pēdējo 30 gadu laikā ir gājusi uz priekšu ar lēcieniem un robežām.Mūsdienu rehabilitācijas teorija tiek nepārtraukti pilnveidota, nepārtraukti pilnveidojas arī rehabilitācijas profilakses, novērtēšanas un ārstēšanas tehnoloģijas.Saistītie jēdzieni pakāpeniski iekļūst dažādās klīniskās disciplīnās un pat cilvēku ikdienas dzīvē.Jo īpaši iedzīvotāju novecošanās tendence visā pasaulē vēl vairāk palielina pieprasījumu pēc rehabilitācijas.Kā svarīga cilvēka līdzdalības un pabeigšanas funkcija sociālajā un ikdienas dzīvē, rokas funkcijai liela uzmanība pievērsta arī tās disfunkcijai un ar to saistītajai rehabilitācijai.
TPieaug dažādu iemeslu izraisītu roku disfunkcijas gadījumu skaits, un efektīva roku funkciju atjaunošana ir pamats pacientu atgriešanās sabiedrībā.Galvenās klīniski nozīmīgas rokas disfunkcijas slimības ir iedalītas trīs galvenajās kategorijās.Pirmā ir traumas izraisītas slimības, piemēram, bieži sastopami lūzumi, cīpslu traumas, apdegumi un citas slimības;otrs ir locītavu iekaisums, cīpslu apvalka iekaisums, miofasciāls sāpju sindroms un citas iekaisuma izraisītas slimības;ir arī dažas īpašas slimības, piemēram, iedzimti augšējo ekstremitāšu defekti, neiromuskulārās kontroles traucējumi, cukura diabēta izraisīti nervu bojājumi, primāra miopātija vai muskuļu atrofija.Tāpēc roku funkciju rehabilitācija ir svarīga kopējās ķermeņa rehabilitācijas sastāvdaļa.
TRokas funkciju rehabilitācijas princips ir pēc iespējas atjaunot slimību vai traumu izraisītus plaukstas vai augšējo ekstremitāšu motoriskos traucējumus.Rokas rehabilitācijai nepieciešama profesionāla ārstniecības komandas sadarbība, kurā ir ortopēdi, PT terapeiti, OT terapeiti, psihoterapeiti un ortopēdisko ierīču inženieri.Profesionāla ārstniecības komanda var sniegt pacientiem dažādu garīgo, sociālo un profesionālo atbalstu, kas ir efektīvas atveseļošanās un sociālās reintegrācijas pamatā.
SStatistika liecina, ka, izmantojot tradicionālo ārstēšanu, tikai aptuveni 15% pacientu pēc insulta var atgūt 50% savas rokas funkcijas, un tikai 3% pacientu var atgūt vairāk nekā 70% no sākotnējās rokas funkcijas.Par karstu tēmu rehabilitācijas jomā kļuvusi efektīvāku rehabilitācijas ārstēšanas metožu izpēte, lai uzlabotu pacienta roku funkciju rehabilitāciju.Šobrīd roku funkciju rehabilitācijas roboti, kas galvenokārt koncentrējas uz uzdevumu orientētu apmācību, pakāpeniski ir kļuvuši par neaizstājamu rehabilitācijas ārstēšanas tehnoloģiju roku funkciju rehabilitācijā, nesot jaunas idejas roku funkciju rehabilitācijai pēc insulta.
Roku funkciju rehabilitācijas robotsir aktīvi kontrolēta mehāniskā piedziņas sistēma, kas piestiprināta pie cilvēka rokas.Tas sastāv no 5 pirkstu sastāvdaļām un plaukstu atbalsta platformas.Pirkstu komponenti izmanto 4 stieņu savienojuma mehānismu, un katru pirksta komponentu darbina neatkarīgs miniatūrs lineārais motors, kas var vadīt katra pirksta saliekšanu un pagarinājumu.Mehāniskā roka ir piestiprināta pie rokas ar cimdu.Tas var virzīt pirkstus sinhroni kustēties, un pirksti un robotizētais eksoskelets tiek savstarpēji uztverti un interaktīvi kontrolēti rehabilitācijas novērtēšanas un apmācības procesā.Pirmkārt, tas var palīdzēt pacientiem ar atkārtotu pirkstu rehabilitācijas apmācību.Šī procesa laikā rokas eksoskelets var virzīt pirkstus, lai veiktu dažādas brīvības pakāpes kustības, izmantojot dažādus vadības režīmus, lai sasniegtu rehabilitācijas apmācības mērķi.Turklāt tas var arī savākt veselīgas rokas elektriskos signālus, kad tā ir kustībā.Izmantojot elektriskās vadības sistēmas kustību modeļa atpazīšanu, tā var analizēt veselīgas rokas žestus un vadīt eksoskeletu, lai palīdzētu skartajai rokai pabeigt to pašu kustību, lai saprastu roku sinhronizācijas un simetrijas treniņš.
In ārstēšanas metožu un efektu ziņā roku rehabilitācijas robotu apmācība būtiski atšķiras no tradicionālās rehabilitācijas apmācības.Tradicionālā rehabilitācijas terapija galvenokārt koncentrējas uz pasīvām aktivitātēm skartajām ekstremitātēm ļenganās paralīzes periodā, kam ir tādi trūkumi kā zema pacientu aktīva līdzdalība un monotons treniņu režīms.Rokas eksoskeleta robots palīdz divpusējās simetrijas apmācībā un spoguļterapijas rehabilitācijas apmācībā.Integrējot redzes, taustes un propriocepcijas pozitīvo atgriezenisko saiti, treniņa procesā var nostiprināt pacienta aktīvās motoriskās kontroles spējas.Izvirzot pacienta aktīvo līdzdalību rokas funkciju rehabilitācijā līdz ļenganajam periodam, ārstēšanā var realizēt motoro nodomu, motora izpildes un motora sajūtu sinhronizāciju, un centru var pilnībā aktivizēt ar atkārtotu stimulāciju un pozitīvu atgriezenisko saiti.Tā ir efektīva rokas funkciju rehabilitācijas treniņu metode hemiplēģijas gadījumā.Šī saliktā rehabilitācijas ārstēšanas metode var ievērojami paātrināt rokas funkciju atveseļošanās procesu insulta pacientiem, un tas ir pamanāms priekšrocības roku funkciju rehabilitācijā pēc insulta.
TRoku funkciju rehabilitācijas robotu sistēma ir izstrādāta, balstoties uz rehabilitācijas medicīnas teoriju, un tai ir daudz īpašību rehabilitācijas ārstēšanas receptēs.Ārstēšanas procesā sistēma reāllaikā simulē roku kustību likumus.Izmantojot katra pirksta neatkarīgo piedziņas sensoru, tas var realizēt dažādus treniņus dažādiem mērķiem, piemēram, vienam pirkstam, vairākiem pirkstiem, pilna pirksta, plaukstas locītavai, pirksta un plaukstas locītavai utt., un tādējādi var precīzi kontrolēt rokas funkcijas realizēties.Turklāt pacientiem ar dažādu muskuļu spēku tiek veikts precīzs EMG signāla novērtējums, lai izvēlētos pacientam mērķtiecīgu treniņu metodi.Novērtēšanas datus un apmācību datus var ierakstīt uzglabāšanai un analīzei, un sistēmu var pieslēgt internetam reāllaika 5G medicīniskajam starpsavienojumam.Sistēma ir aprīkota arī ar dažādiem treniņu režīmiem, piemēram, pasīvais treniņš, aktīvs-pasīvs treniņš, aktīvais treniņš, un atbilstošus treniņus var izvēlēties atbilstoši pacienta dažādajam muskuļu spēkam.


Sākotnējais īkšķa EMG novērtējums un četru pirkstu EMG novērtējums ir viens no veidiem, kā iegūt pacienta bioloģiskās ķermeņa uzbūves signālu, analizēt kustības nodomu, ko attēlo ķermeņa uzbūves signāls, un pēc tam pabeigt eksoskeleta rehabilitācijas rokas kontroli, lai īstenotu rehabilitācijas apmācību.
Muskuļu kontrakciju radītās potenciālās izmaiņas tiek noteiktas no ķermeņa virsmas, un pēc signāla pastiprināšanas un filtrēšanas, lai novērstu trokšņa signālu, digitālie signāli tiek pārveidoti, parādīti un ierakstīti datorā.
Virsmas EMG signālam piemīt labas reāllaika veiktspējas, spēcīgas bionikas īpašības, ērta darbība un vienkārša vadība, kas nozīmē, ka tas var spriest par ekstremitāšu kustības režīmu atbilstoši cilvēka ķermeņa virsmas EMG.
ASaskaņā ar daudziem klīniskiem eksperimentiem šis produkts galvenokārt ir izmantojams nervu sistēmas bojājumu, piemēram, insulta (smadzeņu infarkta, smadzeņu asiņošanas) izraisītu roku disfunkciju rehabilitācijas ārstēšanai.Jo agrāk pacients sāk trenējoties ar A5 sistēmu, jo labāk var iegūt funkcionālās atveseļošanās efektu.Daži pētījuma rezultāti ir parādīti zemāk esošajā attēlā.
(1. attēls: klīniskais pētījums ar nosaukumuEMG iedarbinātas robotas rokas ietekme uz rokas funkciju rehabilitāciju agrīna insulta pacientiem)
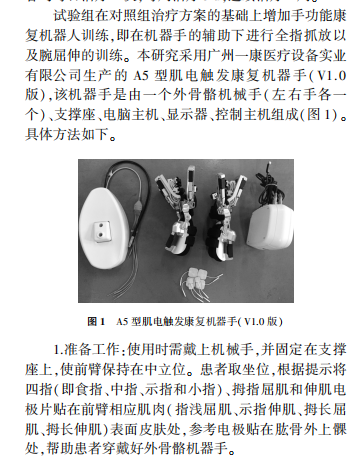
(2. attēls: klīniskajā pētījumā tika izmantota Yeecon roku rehabilitācijas sistēma A5)
Šo pētījumu rezultāti liecina, ka elektromiogrāfijas izraisītā rehabilitācijas robotā roka var uzlabot insulta pacientu rokas motorisko funkciju.Tam ir noteikta atsauces nozīme rokas funkciju rehabilitācijā agrīniem insulta pacientiem.
Kompanijas profils
GuandžouYikang MedicalEquipment Industrial Co., Ltd. ir dibināta 2000. gadā. Tas ir augsto tehnoloģiju uzņēmums un augstas kvalitātes inteliģentas rehabilitācijas medicīnas pakalpojumu sniedzējs, kas integrē pētniecību un attīstību, ražošanu, pārdošanu un pēcpārdošanas pakalpojumus.Ar misiju “palīdzēt pacientiem sasniegt laimīgu dzīvi” un vīziju par “inteliģence atvieglo rehabilitāciju”, Yikang Medical ir apņēmības pilns kļūt par līderi inteliģentās rehabilitācijas jomā Ķīnā un dot ieguldījumu dzimtenes rehabilitācijas nozarē.
Kopš tās dibināšanas 2000. gadā Yikang Medical ir piedzīvojusi 20 kāpumus un kritumus.2006. gadā tā izveidoja aR&Dcentrs, koncentrējoties uz augstākās klases rehabilitācijas produktu izpēti un izstrādi.2008. gadā Yikang Medical bija pirmais uzņēmums, kas Ķīnā ierosināja viedās rehabilitācijas koncepciju.Tas ir jauns laikmets vietējo viedo rehabilitācijas produktu izstrādei, un tajā pašā gadā Ķīnā tika laists klajā pirmais inteliģentais rehabilitācijas robots A1.Kopš tā laika tas ir sācis vairākusAsērijas inteliģentie rehabilitācijas produkti.2013. gadā Yikang Medical tika novērtēts kā valsts augsto tehnoloģiju uzņēmums un nacionālās demonstrācijas bāzes būvniecības vienība tradicionālās ķīniešu medicīnas diagnostikas un ārstēšanas aprīkojuma ražošanai.2018. gadā tā tika novērtēta kā Ķīnas Rehabilitācijas medicīnas biedrības vecākais loceklis un CARM rehabilitācijas robotu alianses sponsors.2019. gadā Yikang ieguva Nacionālās zinātnes un tehnoloģiju progresa balvas otro vietu, piedalījās trīs svarīgākajos valsts zinātniskās pētniecības projektos un piedalījās 13. piecgades plāna obligātās mācību programmas sastādīšanā.
2020. gada 10. janvārī Ķīnas Tautas Republikas prezidentsMr.Sji Dzjiņpins pasniedza balvas Yikang Medical, Fujian Tradicionālās ķīniešu medicīnas universitātei, Honkongas Politehniskajai universitātei un citām struktūrvienībām par galveno tehnoloģiju un integrētas tradicionālās ķīniešu un rietumu medicīnas rehabilitācijas klīniskās pielietošanas projektu pēcinsulta disfunkcijas gadījumā. Cilvēki.
Yikang Medical paliek uzticīgs sākotnējam mērķim, vienmēr patur prātā savu atbildību kā vadošais uzņēmums inteliģentās rehabilitācijas jomā un veic trīs galvenos valsts pētniecības un attīstības projektus īpašajā projektā “Proaktīva veselības un novecošanas tehnoloģiju reakcija”, kas ietver vokalizācijas un runas disfunkciju rehabilitācijas apmācību. sistēma, ekstremitāšu motoru disfunkciju rehabilitācijas apmācības sistēma un cilvēka muguras smadzeņu traumu robots.

Lasīt vairāk:
Agrīnas roku rehabilitācijas nepieciešamība
Kas ir rehabilitācijas robots?
Rokas funkciju apmācības un novērtēšanas sistēma
Izlikšanas laiks: 21. jūnijs 2022