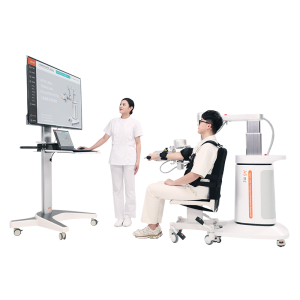


Gait Training Robotics ဆိုတာ ဘာလဲ
စက်ရုပ်လေ့ကျင့်ခြင်းနှင့် အကဲဖြတ်ခြင်းတို့ကို ပြုလုပ်သည်။လမ်းလျှောက်ခြင်းဆိုင်ရာ ကမောက်ကမဖြစ်မှုများအတွက် ပြန်လည်ထူထောင်ရေးလေ့ကျင့်ရေးကိရိယာတစ်ခု။၎င်းသည် gait လေ့ကျင့်မှုကိုဖွင့်ရန်အတွက်ကွန်ပြူတာထိန်းချုပ်မှုစနစ်နှင့် gait correction device ကိုအသုံးပြုသည်။ချမှတ်ခြင်းလူနာများသည် ဖြောင့်စင်းသော စတီရီယို အနေအထားအောက်တွင် အထပ်ထပ်၊ ပုံသေ လမ်းလျှောက်လေ့ကျင့်မှုဖြင့် ၎င်းတို့၏ ပုံမှန်လမ်းလျှောက်မှတ်ဉာဏ်ကို အားကောင်းစေသည်။လမ်းလျှောက်စက်ရုပ်ဖြင့် လူနာများ တတ်နိုင်သည်။သူတို့၏ ဦးနှောက်ထဲတွင် ၎င်းတို့၏ လမ်းလျှောက်ခြင်း လုပ်ငန်းဆောင်တာများကို ပြန်လည်တည်ဆောက်ပါ။မှန်ကန်သော လမ်းလျှောက်မုဒ်ကို သတ်မှတ်ပါ။ထို့ထက်မက စက်ရုပ်ကို ထိထိရောက်ရောက်၊လမ်းလျှောက်ခြင်း ကြွက်သားများနှင့် အဆစ်များဆိုင်ရာ လေ့ကျင့်ခန်းများပြန်လည်ထူထောင်ရေး အတွက် ကောင်းမွန်သော၊
လမ်းလျှောက်လေ့ကျင့်ရေး စက်ရုပ်များသည် လေဖြတ်ခြင်း (ဦးနှောက်သွေးကြောပေါက်ခြင်း၊ ဦးနှောက်သွေးယိုစီးခြင်း) ကဲ့သို့သော အာရုံကြောစနစ်ပျက်စီးခြင်းကြောင့် ဖြစ်ပေါ်လာသော လမ်းလျှောက်မသန်စွမ်းမှုကို ပြန်လည်ထူထောင်ရန်အတွက် သင့်လျော်သည်။လူနာသည် စောစောစီးစီး လေ့ကျင့်ခန်းစလုပ်လေ၊ ပြန်လည်ထူထောင်ရေးကာလ တိုတောင်းလေဖြစ်သည်။
Gait Training Robotics ၏ ကုထုံးအကျိုးသက်ရောက်မှုကား အဘယ်နည်း။
1၊ အစောပိုင်း လမ်းလျှောက်လေ့ကျင့်မှုအတွင်း ပုံမှန်လမ်းလျှောက်ခြင်းမုဒ်ကို ပြန်လည်စတင်ပါ။
2၊ ထိထိရောက်ရောက် နှောင့်ယှက်ခြင်းကို သက်သာစေပြီး အဆစ်များ လှုပ်ရှားနိုင်မှု တိုးတက်စေခြင်း၊
3၊ သွက်လက်သောကိုယ်အလေးချိန် ပံ့ပိုးမှု၊ proprioceptive ထည့်သွင်းမှုကို မြှင့်တင်ရန်၊ ထိန်းသိမ်းရန်နှင့် ကြွက်သားများ အားကောင်းစေခြင်း။
Gait လေ့ကျင့်ရေးစက်ရုပ်တွင် မည်သည့်အင်္ဂါရပ်များ ရှိသနည်း။
1၊ ပုံမှန်လမ်းလျှောက်စက်ဝန်းအတိုင်း ဒီဇိုင်းဆွဲပါ။
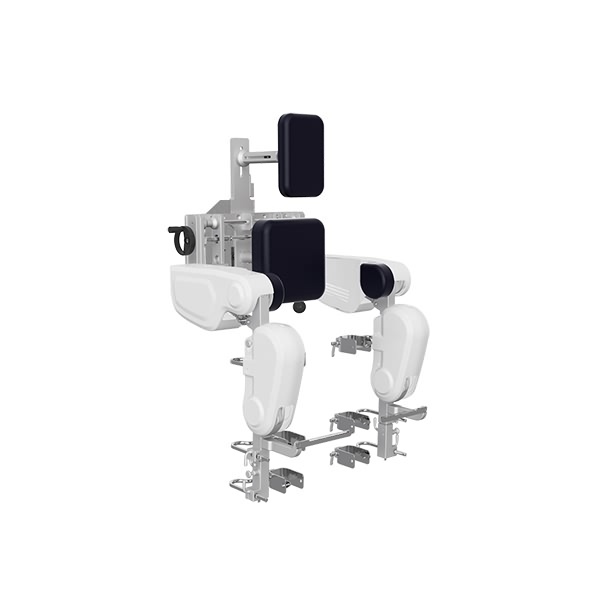
2၊ တင်သွင်းထားသော servo မော်တာများ - အဆစ်လှုပ်ရှားမှုထောင့်နှင့် လမ်းလျှောက်ခြင်းအမြန်နှုန်းကို တိကျစွာထိန်းချုပ်ပါ။
3၊ Active နှင့် passive လေ့ကျင့်ရေးမုဒ်များ။
4၊ လမ်းပြစွမ်းအားသည် ပျော့ပျောင်းပြီး ချိန်ညှိနိုင်သော၊
5၊ gait offset ဖြင့် ပုံမှန်မဟုတ်သော လမ်းလျှောက်ခြင်းအလေ့အထကို ပြုပြင်ခြင်း၊
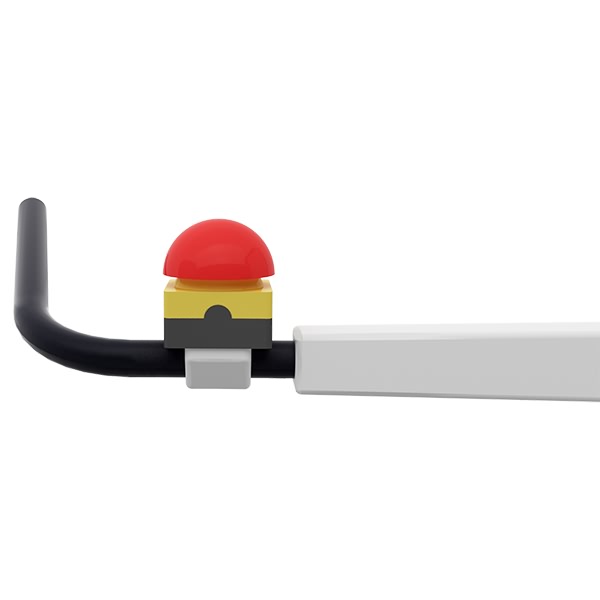
6, spasm ထောက်လှမ်းခြင်းနှင့်ကာကွယ်မှု;
7၊ ဆိုင်းထိန်းစနစ်တွင် ပံ့ပိုးမှုမုဒ်နှစ်ခုရှိသည်။ အထဲမှာလည်း ထောက်ခံတယ်။: လူနာများအား ဘီးတပ်ကုလားထိုင်မှ မတ်တပ်ရပ်သည့် အခြေအနေသို့ လွှဲပြောင်းရန် လွယ်ကူစေသော ဒေါင်လိုက် ရုတ်သိမ်းခြင်းနှင့် ဆင်းသက်ခြင်းအတွက် သင့်လျော်သည်။Dynamic ပံ့ပိုးမှု: လမ်းလျှောက်စက်ဝန်းရှိ ခန္ဓာကိုယ်၏ ဆွဲငင်အား၏ဗဟိုကို ဒိုင်နမစ် ချိန်ညှိခြင်း။
8၊ မူပိုင်ခွင့် ပြေးစက်- ပြေးစက်၏အမြန်နှုန်းနှင့် gait corrector သည် အလိုအလျောက် ထပ်တူပြုပါသည်။အနိမ့်ဆုံးမြန်နှုန်းမှာ 0.1km/h ဖြစ်သည်။စောစီးစွာ ပြန်လည်ထူထောင်ရေးသင်တန်းအတွက် သင့်လျော်သော၊ပြေးစက်သည် ကူရှင်အဖြစ် အလုပ်လုပ်နိုင်သည်။လူနာများ၏ ဒူးနှင့် အရွတ်များကို ကာကွယ်ပေးသည်။
9၊ virtual scene တုံ့ပြန်ချက်သင်တန်း- လေ့ကျင့်မှု၏ စိတ်အားထက်သန်မှုကို မြှင့်တင်ပါ၊ ငြီးငွေ့ဖွယ်ကုသမှုကို လျှော့ချပေးပြီး၊လူနာများ၏ပြန်လည်ထူထောင်ရေးလုပ်ငန်းစဉ်ကိုမြှင့်တင်.
10၊ ဆော့ဖ်ဝဲ - ကုသမှုအချက်အလက်နှင့် ကုသမှုအစီအစဉ်များကို မှတ်တမ်းတင်ရန်အတွက် လူနာများ၏ဒေတာဘေ့စ်ကို ထူထောင်ပါ။ကုသမှုအစီအစဥ်သည် တိကျသောထိန်းချုပ်မှုနှင့် တိကျသောပြန်လည်ကောင်းမွန်မှုရရှိရန် ချိန်ညှိနိုင်သည်။လူနာ၏ခြေထောက်ခုခံမှုမျဉ်းကွေးကို အချိန်နှင့်တပြေးညီပြသပါ။အချိန်နှင့်တပြေးညီစောင့်ကြည့်လူနာ၏ တက်ကြွသော တွန်းအား အခြေအနေကို စောင့်ကြည့်ခြင်း၊
လွန်ခဲ့သည့်ဆယ်စုနှစ်များအတွင်း ကျွန်ုပ်တို့သည် ပြန်လည်ထူထောင်ရေးဆိုင်ရာ ကိရိယာများအပါအဝင် ပြန်လည်ထူထောင်ရေးဆိုင်ရာ ကိရိယာများစွာကို တီထွင်ခဲ့သည်။ရုပ်ပိုင်းဆိုင်ရာကုထုံးနှင့်စက်ရုပ်များကို ပြန်လည်ပြုပြင်ပေးသည်။.သင့်အတွက် အထောက်အကူအရှိဆုံးအရာကို ရှာပါ၊ အားမနာပါ။ဆက်သွယ်ရန် မက်ဆေ့ချ်တစ်စောင် ပေးပို့ပါ။.