







Upper Extremity Rehabilitation Robot A6-2S အကြောင်း
ကွန်ပြူတာနည်းပညာကိုအခြေခံ၍ လက်မောင်းပြန်လည်ထူထောင်ရေးနှင့် အကဲဖြတ်စက်ရုပ်များသည် ပြန်လည်ထူထောင်ရေးဆေးပညာသီအိုရီအရ ခြေလက်အပေါ်ပိုင်းလှုပ်ရှားမှုကို အချိန်နှင့်တပြေးညီ ပုံဖော်နိုင်သည်။၎င်းသည် 3D အာကာသအတွင်း တိကျသောထိန်းချုပ်မှုကို နားလည်သဘောပေါက်စေပြီး သုံးဖက်မြင်အာကာသအတွင်း လွတ်လပ်မှု၏ အဓိကဒီဂရီ 6 ဒီဂရီတွင် လေ့ကျင့်ပေးသည်။လှုပ်ရှားမှု လမ်းညွှန်ချက် ခြောက်ချက် (ပခုံးထည့်ခြင်းနှင့် ပြန်ပေးဆွဲခြင်း၊ ပခုံးကွေးခြင်း၊ ပခုံးအဆစ်များကို ညှစ်ထုတ်ခြင်းနှင့် ထိုးသွင်းခြင်း၊ တံတောင်ဆစ်ကွေးခြင်း၊ လက်ဖျံနှင့် ပက်လက်ဆွဲခြင်း၊ လက်ကောက်ဝတ် ပါလာမာကွေးခြင်း နှင့် dorsiflexion) တို့အတွက် တိကျသော အကဲဖြတ်ခြင်းကို ပြုလုပ်နိုင်ပါသည်။ (ပခုံး၊ တံတောင်ဆစ်နှင့် လက်ကောက်ဝတ်)။၎င်းသည် ကုသမှုဆိုင်ရာ ထိရောက်မှုကို မြှင့်တင်ပေးသည့် ကုသရေးအစီအစဉ်များ ပြုလုပ်ရာတွင် အထောက်အကူဖြစ်စေရန်အတွက် အကဲဖြတ်မှုဒေတာကို အချိန်နှင့်တပြေးညီ ပိုင်းခြားစိတ်ဖြာနိုင်သည်။စနစ်တွင် passive training၊ active-passive training နှင့် active training အပါအဝင် လေ့ကျင့်ရေးမုဒ်ငါးခုရှိသည်။ပြန်လည်ထူထောင်ရေး စက်ဝန်းတစ်ခုလုံးတွင် ၎င်းကို အသုံးပြုနိုင်သည်။လေ့ကျင့်ရေးလုပ်ဆောင်ချက်ကို အမျိုးမျိုးသော လုပ်ငန်းဆောင်တာများကို ဦးတည်သည့် အခြေအနေဆိုင်ရာ virtual အပြန်အလှန်တုံ့ပြန်မှုဂိမ်းများနှင့် ပေါင်းစပ်ထားပြီး လူနာများကို အမျိုးမျိုးသော စိတ်ကြိုက်လေ့ကျင့်မှု၊ လူနာများ၏ အစပျိုးမှုနှင့် မှီခိုမှုကို ပိုမိုကောင်းမွန်စေကာ လူနာများ၏ ပြန်လည်ထူထောင်ရေးဆိုင်ရာ တိုးတက်မှုကို အရှိန်မြှင့်ပေးသည်။အကဲဖြတ်ခြင်းနှင့် လေ့ကျင့်ရေးဒေတာများကို မှတ်တမ်းတင်ခြင်း၊ သိမ်းဆည်းခြင်း၊ ခွဲခြမ်းစိတ်ဖြာပြီး စနစ်အား အင်တာနက်သို့ ချိတ်ဆက်ထားသည့်အခါ အချိန်နှင့်တပြေးညီ မျှဝေနိုင်ပါသည်။

A6 သည် ဗဟိုအာရုံကြောစနစ်၊ အစွန်းအာရုံကြော၊ ကျောရိုး၊ ကြွက်သား သို့မဟုတ် အရိုးရောဂါကြောင့်ဖြစ်သည်။ထုတ်ကုန်သည် တိကျသောလေ့ကျင့်ခန်းများကို ပံ့ပိုးပေးသည်၊ ကြွက်သားများ၏ ကြံ့ခိုင်မှုကို မြှင့်တင်ပေးကာ အဆစ်များအတွက် ရွေ့လျားမှုအကွာအဝေးကို ချဲ့ထွင်ကာ မော်တာလုပ်ဆောင်ချက်ကို တိုးတက်စေသည်။
–
Upper Extremity Rehabilitation Robot A6-2S ၏ လေ့ကျင့်ရေးပုံစံ 5 ခု
Passive လေ့ကျင့်ရေးမုဒ်
'trajectory programming' မုဒ်မှတဆင့်၊ ကုသသူများသည် လူနာများအတွက် သီးသန့်နှင့် ပစ်မှတ်ထားသော passive trajectory လေ့ကျင့်မှုကို ပံ့ပိုးပေးရန်အတွက် ပစ်မှတ်အဆစ်အမည်၊ လှုပ်ရှားမှုအကွာအဝေးနှင့် အဆစ်လှုပ်ရှားမှုအမြန်နှုန်းကဲ့သို့သော ကန့်သတ်ချက်များကို သတ်မှတ်နိုင်သည်။စိတ်ဝင်စားစရာကောင်းသော အခြေအနေဆိုင်ရာဂိမ်းများမှတဆင့် Passive Training သည် ပို၍ပျော်စရာကောင်းပါလိမ့်မည်။
Active-Passive လေ့ကျင့်ရေးမုဒ်
စနစ်သည် လူနာများအား 'လမ်းပြမှု' ထက် ချိန်ညှိမှုဖြင့် လေ့ကျင့်မှုပြီးမြောက်ရန် ကူညီပေးသည်။လမ်းပြအင်အား ကြီးလေ၊ စနစ် အရန် ဒီဂရီ ပိုမြင့်လေ၊လမ်းပြစွမ်းအား သေးငယ်လေ၊ လူနာ၏ တက်ကြွစွာ ပူးပေါင်းပါဝင်မှု ဒီဂရီ မြင့်မားလေဖြစ်သည်။ကုထုံးဆရာများသည် ဂိမ်းလေ့ကျင့်ရေးလုပ်ငန်းစဉ်တွင် လူနာ၏ကျန်နေသောကြွက်သားခွန်အားကို တွန်းအားပေးရန်အတွက် လူနာ၏ကြွက်သားခွန်အားဒီဂရီအလိုက် လမ်းညွှန်စွမ်းအားကို သတ်မှတ်နိုင်သည်။
တက်ကြွလေ့ကျင့်ရေးမုဒ်
လူနာများသည် သုံးဖက်မြင် အာကာသအတွင်း မည်သည့် ဦးတည်ရာသို့မဆို စက်လက်မောင်းကို လွတ်လပ်စွာ မောင်းနှင်နိုင်သည်။ကုထုံးပညာရှင်များသည် လူနာ၏လိုအပ်ချက်အရ လေ့ကျင့်ရေးအဆစ်များကို စိတ်ကြိုက်ရွေးချယ်နိုင်ပြီး အဆစ်တစ်ခုတည်း သို့မဟုတ် အများအပြားအဆစ်လေ့ကျင့်မှုအတွက် သင့်လျော်သော အပြန်အလှန်တုံ့ပြန်ကစားနည်းများကို ရွေးချယ်နိုင်သည်။ဤနည်းအားဖြင့် လူနာများ၏ လေ့ကျင့်ရေးအစပျိုးမှုကို မြှင့်တင်နိုင်ပြီး ပြန်လည်ထူထောင်ရေး တိုးတက်မှုကို အရှိန်မြှင့်နိုင်သည်။
ဆေးညွှန်းလေ့ကျင့်ရေးမုဒ်
ဤမုဒ်သည် ဆံပင်ဖြီးခြင်း၊ အစာစားခြင်း စသည်တို့ပါဝင်သည့် နေ့စဉ်လူနေမှုဘ၀နှင့် လုပ်ငန်းခွင်ကုထုံးများကို လေ့ကျင့်သင်ကြားပေးရန် ပိုမိုစိတ်၀င်စားပါသည်။ ကုသသူများသည် လူနာအား လေ့ကျင့်မှုအမြန်စတင်ရန် ကူညီပေးရန်အတွက် လေ့ကျင့်ရေးဆေးညွှန်းများကို ရွေးချယ်နိုင်ပါသည်။လူနာ၏အခြေအနေအရ သတ်မှတ်ချက်များအားလုံးကို လူနာ၏နေ့စဉ်နေထိုင်မှုလုပ်ငန်းဆောင်တာများတွင် ကောင်းစွာလိုက်လျောညီထွေဖြစ်အောင်လုပ်ဆောင်နိုင်စေရန်အတွက် အကောင်းဆုံးလုပ်ဆောင်ပေးပါသည်။
Trajectory Learning Mode
A6 သည် AI မှတ်ဉာဏ်လုပ်ဆောင်ချက်ပါရှိသော 3D အပေါ်ပိုင်းပြန်လည်ထူထောင်ရေးစက်ရုပ်ဖြစ်သည်။စနစ်တွင် cloud memory storage function ကို တပ်ဆင်ထားပြီး၊ ကုထုံးဆရာ၏ တိကျသော လှုပ်ရှားမှုလမ်းကြောင်းကို လေ့လာမှတ်သားနိုင်ပြီး ၎င်းကို အပြည့်အဝ ပြန်လည်ရယူနိုင်သည်။ ပစ်မှတ်နှင့် ပုဂ္ဂိုလ်ရေးသီးသန့် ရွေ့လျားမှုလမ်းကြောင်းများကို မတူညီသော လူနာများအတွက် ဒီဇိုင်းထုတ်ထားပါသည်။ဤနည်းအားဖြင့် လူနာများ၏ လှုပ်ရှားမှုလုပ်ဆောင်ချက်ကို မြှင့်တင်နိုင်စေရန် အာရုံစူးစိုက်မှုနှင့် ထပ်ခါတလဲလဲ လေ့ကျင့်မှုများကို သိရှိနိုင်သည်။
–
ဒေတာကြည့်ရှုခြင်း။
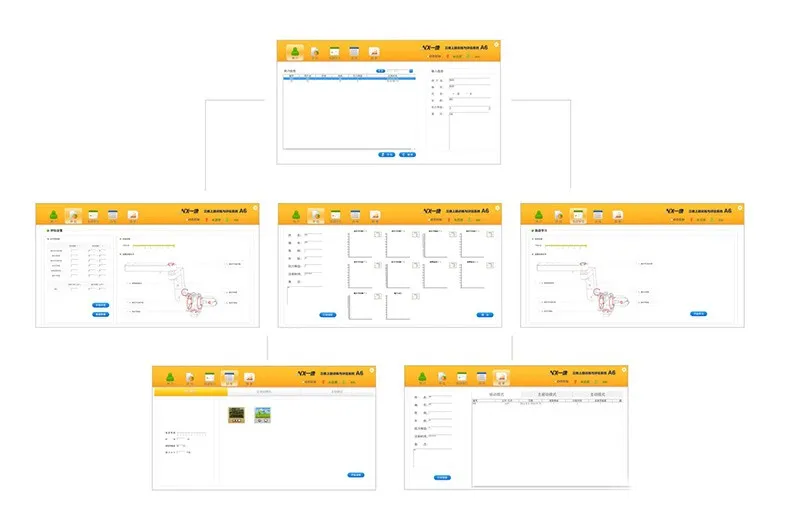
အသုံးပြုသူကို- လူနာဝင်ရောက်ခြင်း၊ မှတ်ပုံတင်ခြင်း၊ အခြေခံအချက်အလက်ရှာဖွေခြင်း၊ ပြုပြင်မွမ်းမံခြင်းနှင့် ဖျက်ခြင်း။
အကဲဖြတ်ခြင်း။− ROM တွင် အကဲဖြတ်ခြင်း၊ ဒေတာသိမ်းဆည်းခြင်းနှင့် ကြည့်ရှုခြင်းအပြင် ပုံနှိပ်ခြင်းနှင့် ကြိုတင်သတ်မှတ်ထားသည့် လမ်းကြောင်းနှင့် မြန်နှုန်းမှတ်တမ်းတင်ခြင်း။
သတင်းပို့တယ်။: လူနာလေ့ကျင့်ရေးအချက်အလက်မှတ်တမ်းမှတ်တမ်းများကိုကြည့်ပါ။
–
အဓိကအင်္ဂါရပ်များ
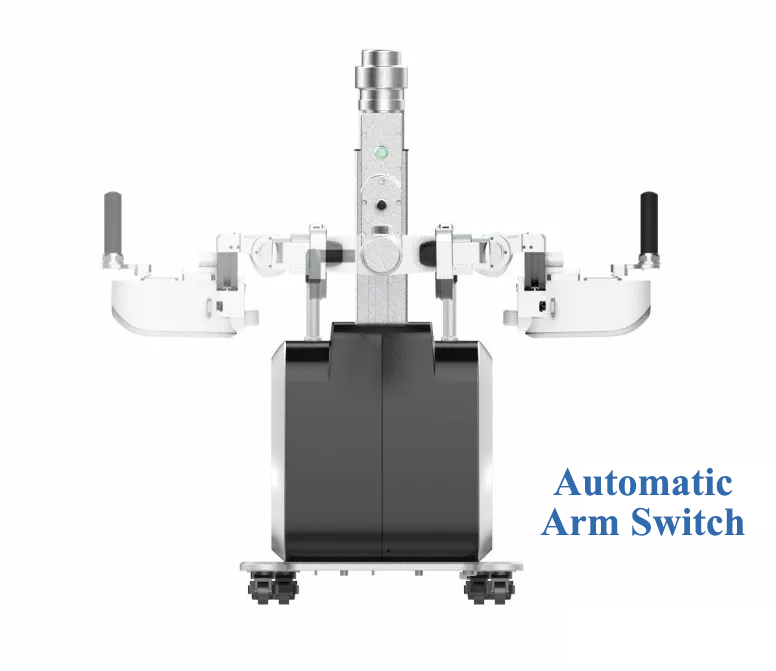
အလိုအလျောက် လက်မောင်းခလုတ်-Upper Limb Training and Evaluation System သည် အလိုအလျောက် လက်မောင်းခလုတ်၏ လုပ်ဆောင်ချက်ကို သိရှိနားလည်နိုင်သော ပထမဆုံး ပြန်လည်ထူထောင်ရေး စက်ရုပ်ဖြစ်သည်။သင်လုပ်ရမှာက ခလုတ်တစ်ချက်နှိပ်ပြီး ဘယ်နဲ့ညာ လက်မောင်းကြားကို ပြောင်းနိုင်ပါတယ်။လွယ်ကူပြီး လျင်မြန်သော လက်မောင်းပြောင်းခြင်း လုပ်ဆောင်ချက်သည် လက်တွေ့ခွဲစိတ်မှု၏ ရှုပ်ထွေးမှုကို လျော့နည်းစေသည်။
လေဆာ ချိန်ညှိမှု-တိကျသောခွဲစိတ်မှုတွင် ကုထုံးကိုကူညီပါ။လူနာများအား ပိုမိုဘေးကင်းသော၊ ပိုမိုသင့်လျော်ပြီး သက်တောင့်သက်သာရှိသော အနေအထားတွင် လေ့ကျင့်နိုင်စေပါ။
Yeecon2000 ခုနှစ်ကတည်းက ပြန်လည်ထူထောင်ရေးဆိုင်ရာ စက်ပစ္စည်းများကို စိတ်အားထက်သန်စွာ ထုတ်လုပ်သူဖြစ်သည်။ ကျွန်ုပ်တို့သည် ပြန်လည်ထူထောင်ရေးဆိုင်ရာ စက်ကိရိယာများကဲ့သို့သော အမျိုးမျိုးသော ပြန်လည်ထူထောင်ရေးကိရိယာများကို တီထွင်ထုတ်လုပ်ပါသည်။ရုပ်ပိုင်းဆိုင်ရာကုထုံးကိရိယာနှင့်ပြန်လည်ထူထောင်ရေး စက်ရုပ်များ.ပြန်လည်ထူထောင်ရေးသံသရာတစ်ခုလုံးကို လွှမ်းခြုံနိုင်သော ပြည့်စုံပြီး သိပ္ပံနည်းကျ ထုတ်ကုန်အစုစုတစ်ခုရှိသည်။ကျွန်ုပ်တို့လည်း ဆောင်ရွက်ပေးပါသည်။လုံး၀ ပြန်လည်ထူထောင်ရေးစင်တာ တည်ဆောက်ရေး ဖြေရှင်းချက်. If you are interested in cooperating with us. Please feel free to leave us a message or send us email at: yikangexporttrade@163.com.
ကျွန်ုပ်တို့သည် သင်နှင့်ပူးပေါင်းဆောင်ရွက်ရန် မျှော်လင့်ပါသည်။

ပိုပြီးဖတ်ပါ:
ထုတ်ကုန်အသစ်မိတ်ဆက် |Lower Limb Rehab Robot A1-3
Rehabilitation Robot ဆိုတာ ဘာလဲ။
Rehabilitation Robotics ၏ အားသာချက်များ
စာတိုက်အချိန်- Jan-19-2022