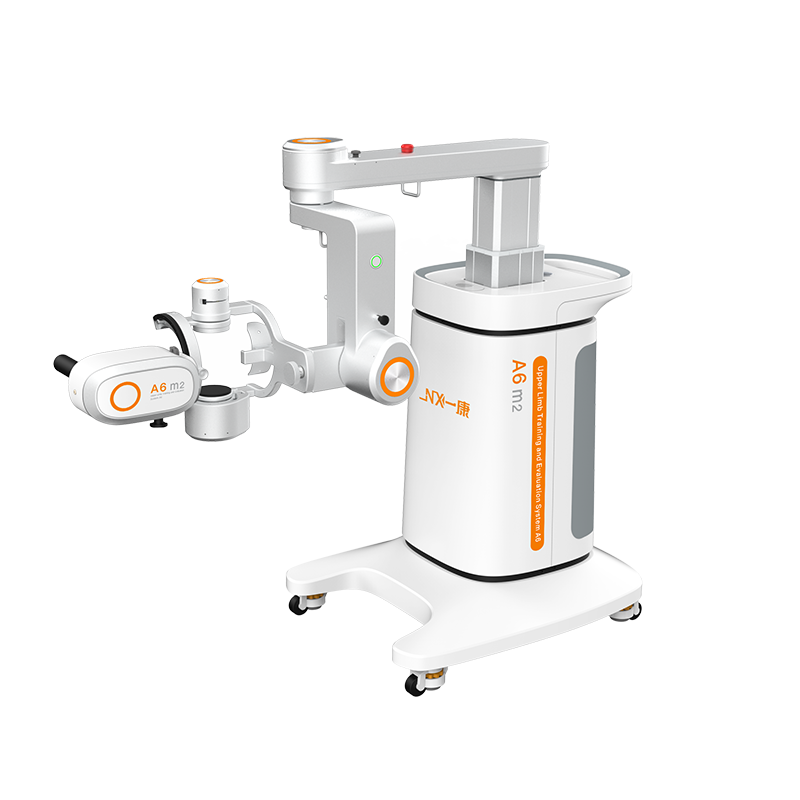
PREZANTIMI - Sistemi i trajnimit dhe vlerësimit të gjymtyrëve të sipërme A6M2 është gjenerata e fundit e robotit inteligjent rehabilitues të gjymtyrëve të sipërme të Yikang.Ai përdor modelin dhe algoritmin dixhital të stërvitjes sportive të gjymtyrëve të sipërme Yikang, të kombinuara me teorinë e rehabilitimit sportiv të gjymtyrëve të sipërme, për të simuluar lëvizjen e gjymtyrëve të sipërme të njeriut në kohë reale, dhe mund të realizojë lëvizjen pasive, lëvizjen aktive dhe lëvizjen e kombinuar aktive dhe pasive të gjymtyrëve të sipërme në dimensione të shumëfishta. . 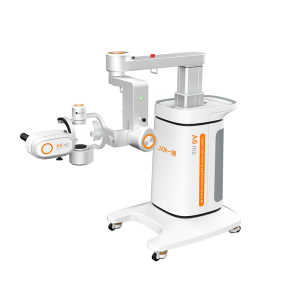 Ky produkt integron vlerësimin e rehabilitimit, ndërveprimin e skenës, trajnimin e simulimit të aktivitetit të jetës së përditshme, trajnimin e programimit inteligjent dhe mësimin dhe trajnimin e personalizuar të trajektores, dhe ofron vlerësim dhe trajnim funksional të gjymtyrëve të sipërme për pacientët me mosfunksionim të forcës muskulore të shkallës 0-5 për të përshpejtuar procesin e rikuperimit të pacientët. PËRPARËSITË - 1.Mund të realizojë lëvizje pasive dhe lëvizje aktive të gjymtyrëve të sipërme në dimensione të shumta.Pacientët mund të stërviten pa forcë muskulore fare. 2. Gama e lëvizjes së nyjeve të nevojshme për të përfunduar stërvitjen e lojës reflektohet nga vlera e vlerësimit të pacientit. 3. Me modalitetin e të mësuarit të trajektores, mësoni dhe regjistroni deri në 3 minuta trajektore manipulimi, shtyni pacientët të kryejnë trajnime për terapinë e restaurimit të trajektores së manipulimit dhe kryeni një numër të madh trajnimesh rehabilituese të përsëritura për pacientët e hershëm për të përmirësuar efikasitetin e trajnimit. 4.Mënyra të ndryshme trajnimi për të përmbushur nevojat e pacientëve në faza të ndryshme të trajnimit rehabilitues. 5.Në modalitetin e trajnimit pasiv, terapisti mund të vendosë deri në 60-at e aktiviteteve ditore si trajektoren e trajnimit të pacientit.Sistemi e shtyn pacientin të kryejë trajnime të përsëritura, të vazhdueshme dhe të qëndrueshme për restaurimin e trajektores së manipulimit sipas trajektores së caktuar të lëvizjes dhe përmes lojërave dhe duke dhënë një stimulim të caktuar shqisor.
Ky produkt integron vlerësimin e rehabilitimit, ndërveprimin e skenës, trajnimin e simulimit të aktivitetit të jetës së përditshme, trajnimin e programimit inteligjent dhe mësimin dhe trajnimin e personalizuar të trajektores, dhe ofron vlerësim dhe trajnim funksional të gjymtyrëve të sipërme për pacientët me mosfunksionim të forcës muskulore të shkallës 0-5 për të përshpejtuar procesin e rikuperimit të pacientët. PËRPARËSITË - 1.Mund të realizojë lëvizje pasive dhe lëvizje aktive të gjymtyrëve të sipërme në dimensione të shumta.Pacientët mund të stërviten pa forcë muskulore fare. 2. Gama e lëvizjes së nyjeve të nevojshme për të përfunduar stërvitjen e lojës reflektohet nga vlera e vlerësimit të pacientit. 3. Me modalitetin e të mësuarit të trajektores, mësoni dhe regjistroni deri në 3 minuta trajektore manipulimi, shtyni pacientët të kryejnë trajnime për terapinë e restaurimit të trajektores së manipulimit dhe kryeni një numër të madh trajnimesh rehabilituese të përsëritura për pacientët e hershëm për të përmirësuar efikasitetin e trajnimit. 4.Mënyra të ndryshme trajnimi për të përmbushur nevojat e pacientëve në faza të ndryshme të trajnimit rehabilitues. 5.Në modalitetin e trajnimit pasiv, terapisti mund të vendosë deri në 60-at e aktiviteteve ditore si trajektoren e trajnimit të pacientit.Sistemi e shtyn pacientin të kryejë trajnime të përsëritura, të vazhdueshme dhe të qëndrueshme për restaurimin e trajektores së manipulimit sipas trajektores së caktuar të lëvizjes dhe përmes lojërave dhe duke dhënë një stimulim të caktuar shqisor.
 6.Në modalitetin e stërvitjes aktive dhe pasive, terapisti mund të rregullojë forcën drejtuese të krahut robotik në çdo nyje të gjymtyrëve të sipërme të pacientit sipas gjendjes së pacientit.Në të njëjtën kohë, nëse pacienti nuk mund të marrë pjesë në mënyrë aktive në trajnim brenda 5 sekondave, sistemi automatikisht do të shndërrohet në një mënyrë trajnimi pasiv për ta shtyrë pacientin të përfundojë trajnimin. 7.Në modalitetin e stërvitjes aktive, pacienti mund të drejtojë krahun mekanik për të lëvizur në çdo drejtim.Modaliteti i trajnimit përfshin trajnim të vetëm të përbashkët dhe stërvitje me shumë të përbashkëta. 8.Vendosni trajektoret e përdorura zakonisht për stërvitjen e gjymtyrëve të sipërme dhe trajektoret e lëvizjeve të jetës së përditshme që pacientët të stërviten shpejt. 9.Mbrojtje e fortë sigurie, monitorim i pavarur i spazmave, dhe gjithashtu kanë dy butona ndalimi emergjent.Përveç kësaj, sistemi softuer monitoron kufirin e diapazonit të lëvizjes së krahut robotik në kohë reale gjatë aktivitetit, mbron plotësisht sigurinë e pacientëve.
6.Në modalitetin e stërvitjes aktive dhe pasive, terapisti mund të rregullojë forcën drejtuese të krahut robotik në çdo nyje të gjymtyrëve të sipërme të pacientit sipas gjendjes së pacientit.Në të njëjtën kohë, nëse pacienti nuk mund të marrë pjesë në mënyrë aktive në trajnim brenda 5 sekondave, sistemi automatikisht do të shndërrohet në një mënyrë trajnimi pasiv për ta shtyrë pacientin të përfundojë trajnimin. 7.Në modalitetin e stërvitjes aktive, pacienti mund të drejtojë krahun mekanik për të lëvizur në çdo drejtim.Modaliteti i trajnimit përfshin trajnim të vetëm të përbashkët dhe stërvitje me shumë të përbashkëta. 8.Vendosni trajektoret e përdorura zakonisht për stërvitjen e gjymtyrëve të sipërme dhe trajektoret e lëvizjeve të jetës së përditshme që pacientët të stërviten shpejt. 9.Mbrojtje e fortë sigurie, monitorim i pavarur i spazmave, dhe gjithashtu kanë dy butona ndalimi emergjent.Përveç kësaj, sistemi softuer monitoron kufirin e diapazonit të lëvizjes së krahut robotik në kohë reale gjatë aktivitetit, mbron plotësisht sigurinë e pacientëve. 10.Ndërrimi automatik midis anës së majtë dhe të djathtë, duke reduktuar funksionimin e rëndë.Në të njëjtën kohë, shtrirja me lazer mund të ndihmojë terapistin të përafrojë pozicionin e duhur të stërvitjes.11.Rivendosja automatike, pasi të përfundojë trajnimi, klikoni butonin e rivendosjes automatike për t'u kthyer në pozicionin fillestar.Versioni i parë: https://www.yikangmedical.com/arm-rehabilitation-assessment-robotics.html
10.Ndërrimi automatik midis anës së majtë dhe të djathtë, duke reduktuar funksionimin e rëndë.Në të njëjtën kohë, shtrirja me lazer mund të ndihmojë terapistin të përafrojë pozicionin e duhur të stërvitjes.11.Rivendosja automatike, pasi të përfundojë trajnimi, klikoni butonin e rivendosjes automatike për t'u kthyer në pozicionin fillestar.Versioni i parë: https://www.yikangmedical.com/arm-rehabilitation-assessment-robotics.html Më shumë produkte të reja:Biçikletë stërvitore aktive pasive pranë krevatit të gjymtyrëve të sipërme dhe të poshtme
Koha e postimit: Jan-30-2024 






 6.Në modalitetin e stërvitjes aktive dhe pasive, terapisti mund të rregullojë forcën drejtuese të krahut robotik në çdo nyje të gjymtyrëve të sipërme të pacientit sipas gjendjes së pacientit.Në të njëjtën kohë, nëse pacienti nuk mund të marrë pjesë në mënyrë aktive në trajnim brenda 5 sekondave, sistemi automatikisht do të shndërrohet në një mënyrë trajnimi pasiv për ta shtyrë pacientin të përfundojë trajnimin.
6.Në modalitetin e stërvitjes aktive dhe pasive, terapisti mund të rregullojë forcën drejtuese të krahut robotik në çdo nyje të gjymtyrëve të sipërme të pacientit sipas gjendjes së pacientit.Në të njëjtën kohë, nëse pacienti nuk mund të marrë pjesë në mënyrë aktive në trajnim brenda 5 sekondave, sistemi automatikisht do të shndërrohet në një mënyrë trajnimi pasiv për ta shtyrë pacientin të përfundojë trajnimin. 10.Ndërrimi automatik midis anës së majtë dhe të djathtë, duke reduktuar funksionimin e rëndë.Në të njëjtën kohë, shtrirja me lazer mund të ndihmojë terapistin të përafrojë pozicionin e duhur të stërvitjes.11.Rivendosja automatike, pasi të përfundojë trajnimi, klikoni butonin e rivendosjes automatike për t'u kthyer në pozicionin fillestar.Versioni i parë: https://www.yikangmedical.com/arm-rehabilitation-assessment-robotics.html
10.Ndërrimi automatik midis anës së majtë dhe të djathtë, duke reduktuar funksionimin e rëndë.Në të njëjtën kohë, shtrirja me lazer mund të ndihmojë terapistin të përafrojë pozicionin e duhur të stërvitjes.11.Rivendosja automatike, pasi të përfundojë trajnimi, klikoni butonin e rivendosjes automatike për t'u kthyer në pozicionin fillestar.Versioni i parë: https://www.yikangmedical.com/arm-rehabilitation-assessment-robotics.html