












gait training equipment / gait robot / full robot / cpm A3
| NAME | gait training equipment |
| MODEL | A3 |



Design principle
Neuroplasticity, Collaborative robot principle,Computer virtual technology
Adaptation diseases
Patients need lower limbs rehabilitation whose lower limbs are powerless and spasm cased by bone joints and nervous system diseases. Such as
•Apoplexy
•Multiple Sclerosis (MS)
•Cerebral palsy(CP)
•Parkinson’s disease
•Spinal cord injury(SCI)
•Traumatic brain injury(TBI)
•Inner using prosthesis(such as replacement of total hip)
•Lower limbs degenerative joint disease(such as knee joint degenerative osteoarthritis)
•Spinal muscular atrophy
•Muscle weakness caused by poor sports
•Hemiplegic patients
•Paraplegic patients
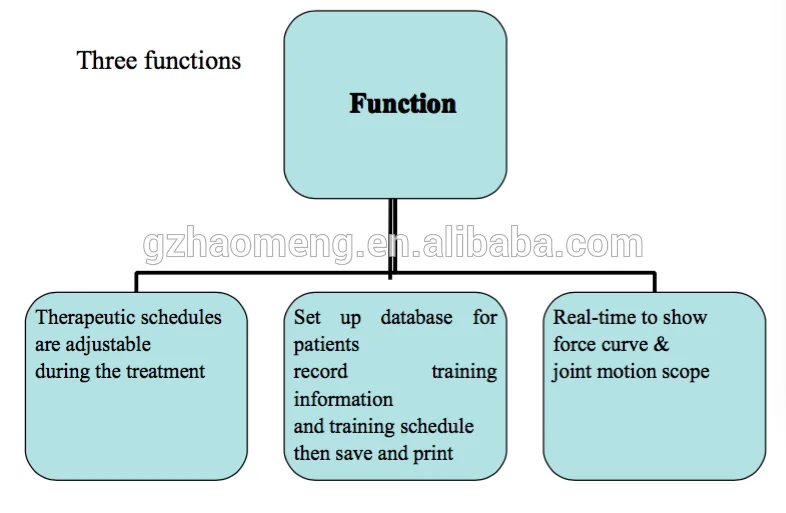
Funution:
- longer and more intensive training sessions compared to manual treadmill training
- real time feedback for a higher motivation and compliance
- physiological gait pattern provided by individually adjustable orthoses, guidance force and body weight support
- assessment and reporting functionality for an easy measurement of the patient’s progress
- Pediatric Orthoses: an optional add-on module offering the first driven gait orthosis for functional and motivating locomotion therapy for small children
Features
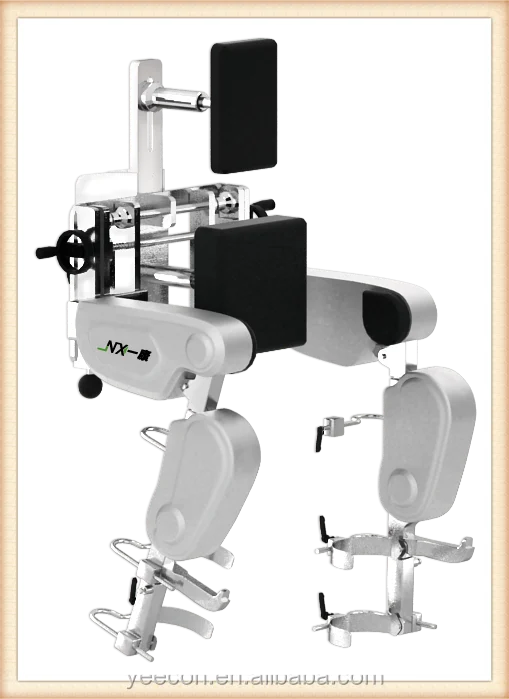
Gait robot
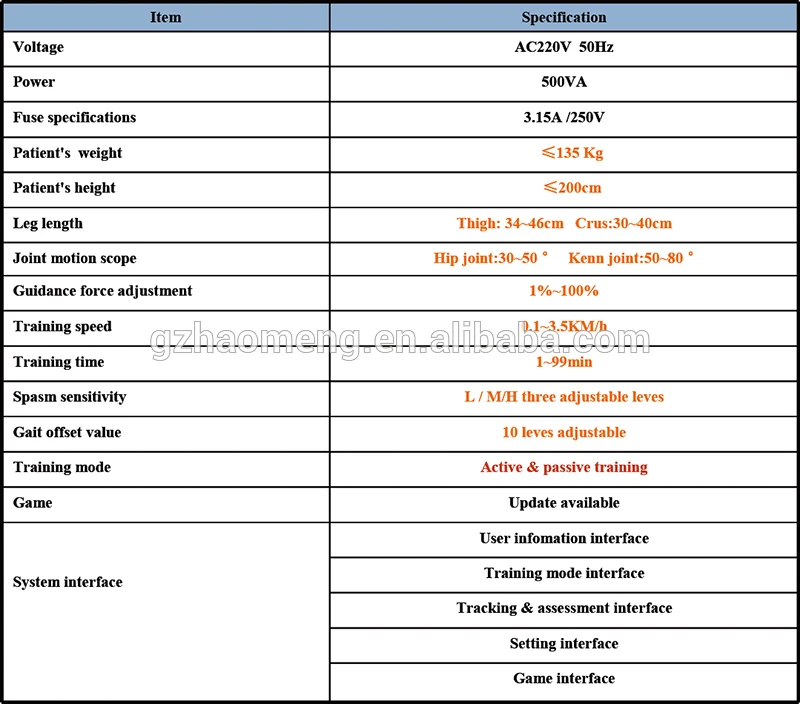
•Guidance force was soft and adjustable(1%-100%)
• Imported servo motor,simulate normal physiological gait, control walking speed and motion range of each joint angle accurately, real-time to adjust gait offset value
•Can do active& passive training
•Spasm detection and protection
•The cushion depth on back and hip are adjustable
Body supporting system
•Static support: convenient to move patients vertically,from wheelchair to standing
•Dynamic support: Real-time to adjust the supporting weight during gait cycle
Treadmill
•Treadmill speed can be adjusted in real-time, ensure the speed between robotic leg and treadmill are synchronously.
•The lowest speed is 0.1 km/h (the highest speed is 3.5 km/h), it is professionalrecovery treadmill
• Buffer treadmill with rubber strip plate design, protect patient’s knee,ankle and ligament

Safty components
•Emergency stop switch to ensure patient’s safety
•Emergency release device, let patients down safely when power outages

Software interface: freely update
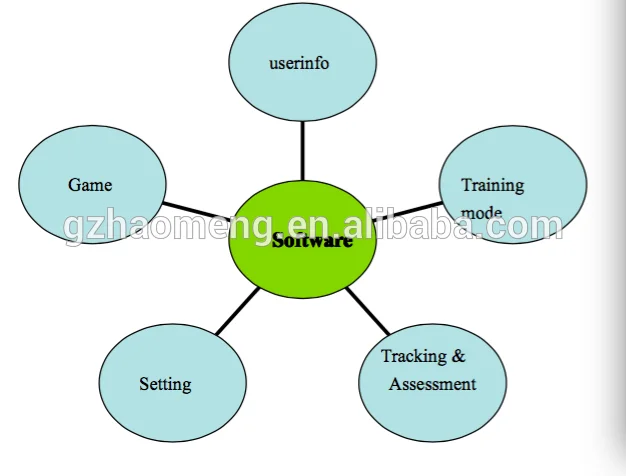
Software functions:
Software features
•Virtual reality technology
•Scene interaction,increase proprioception input, improve patient’s training interest

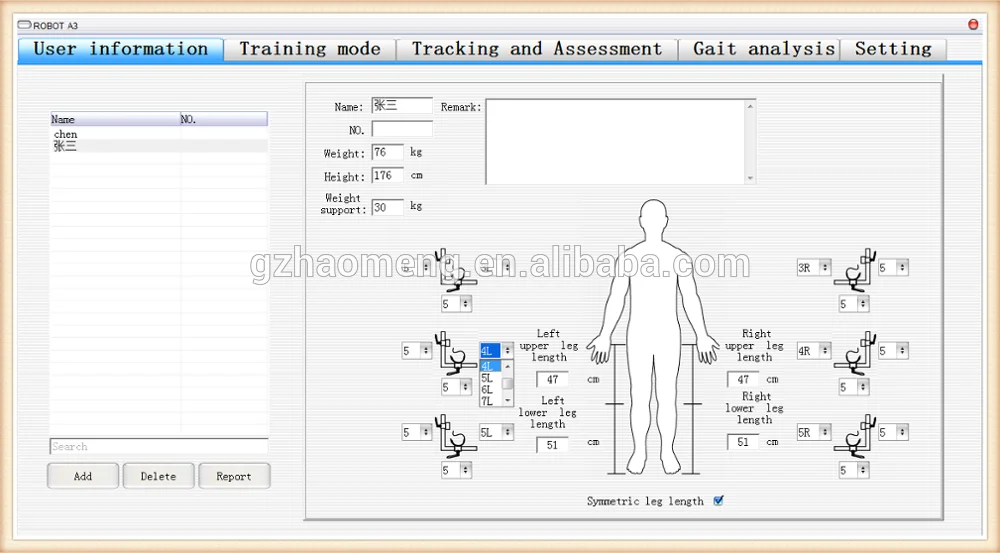
User information interface
Training mode interface
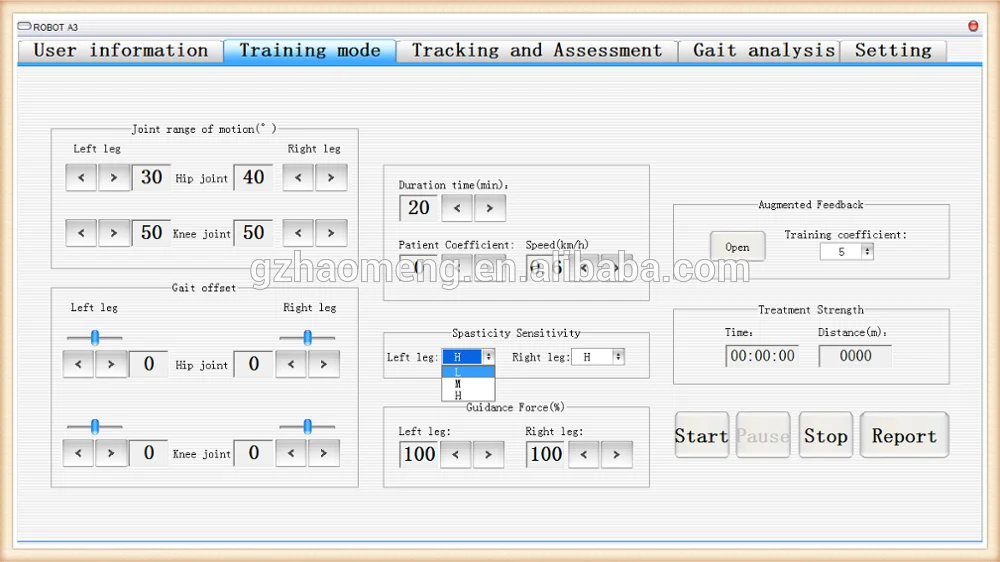
Tarining setting
Set joint motion scope, gait offset value, spasm sensitivity, guidance forceand display treatment strength
Tracking & assessment interface
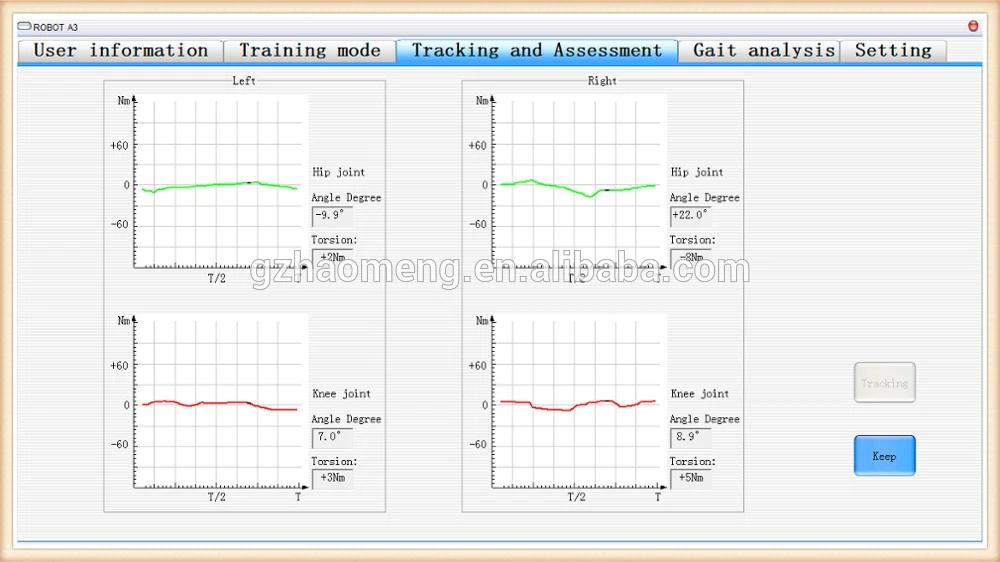
Tracking & evaluation
In real time, track and display the motor torque size on left and right leg, stress,instantaneous value of angle
Production information
-

YK-8000C1 8 Sections Chiropractic Table
-

YK-8000C2 9 Section Portable Chiropractic Table
-

A6-2 Arm Rehabilitation and Assessment Robotics
-

A2 Arm Rehabilitation Robotics
-

YK-8000E1 Automatic Tilt Table
-
YK-8000A Bobath Table Supported by LINAK Motor
-

PE6 Frequency Conversion Electric Therapy Device
-

A7-2 Gait Analysis System
-

A3-2 Gait Training and Assessment Robotics
-

A3-2 Gait Training and Evaluation Robot