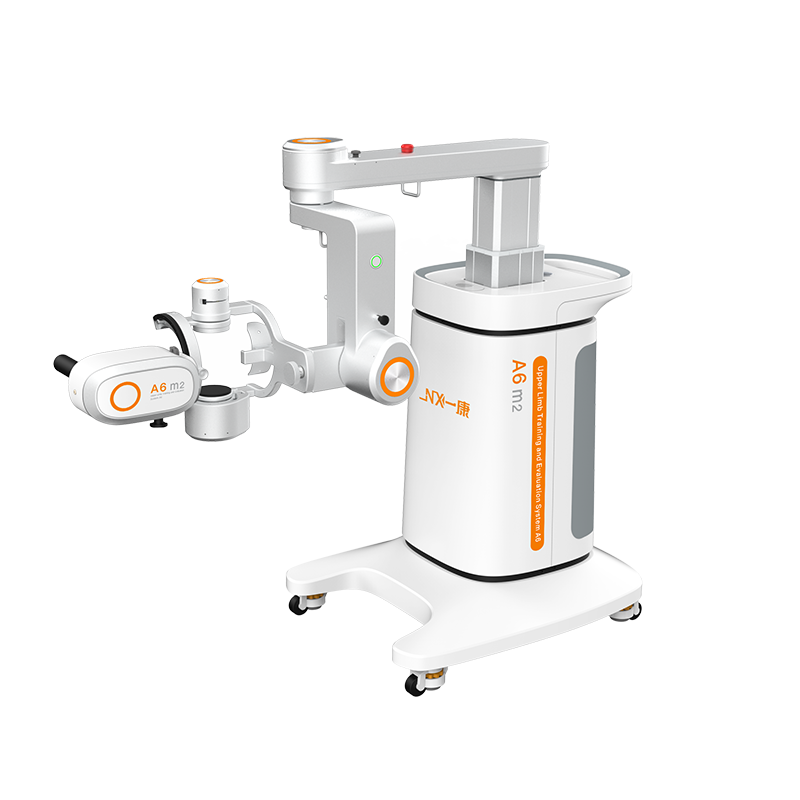
UTANGULIZI - Mfumo wa mafunzo na tathmini wa kiungo cha juu A6M2 ni kizazi cha hivi punde zaidi cha Yikang cha roboti ya urekebishaji ya viungo vya juu.Inatumia mafunzo ya michezo ya Yikang ya kiungo cha juu cha kielelezo na algoriti, pamoja na nadharia ya urekebishaji wa viungo vya juu vya michezo, kuiga mwendo wa kiungo cha juu cha binadamu kwa wakati halisi, na inaweza kutambua harakati za kupita kiasi, harakati amilifu na harakati ya pamoja na ya kupita ya viungo vya juu katika vipimo vingi. . 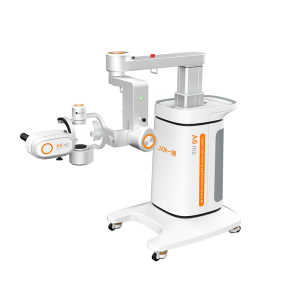 Bidhaa hii inaunganisha tathmini ya urekebishaji, mwingiliano wa eneo, mafunzo ya uigaji wa shughuli za maisha ya kila siku, mafunzo ya akili ya upangaji na ujifunzaji na mafunzo ya kibinafsi, na hutoa tathmini ya utendaji ya viungo vya juu na mafunzo kwa wagonjwa walio na upungufu wa nguvu ya misuli ya daraja la 0-5 ili kuharakisha mchakato wa kurejesha wagonjwa. FAIDA - 1.Inaweza kutambua harakati ya passiv na harakati hai ya viungo vya juu katika vipimo vingi.Wagonjwa wanaweza kufanya mazoezi bila nguvu ya misuli hata kidogo. 2. Mzunguko wa mwendo wa viungo vinavyohitajika ili kukamilisha mafunzo ya mchezo huonyeshwa na thamani ya tathmini ya mgonjwa. 3. Ukiwa na hali ya kujifunza kwa njia ya trajectory, jifunze na urekodi hadi dakika 3 za njia ya kudanganywa, endesha wagonjwa kutekeleza mafunzo ya tiba ya urejeshaji wa njia ya upotoshaji, na ufanye idadi kubwa ya mafunzo ya urekebishaji ya kurudia kwa wagonjwa wa mapema ili kuboresha ufanisi wa mafunzo. 4.Njia mbalimbali za mafunzo ili kukidhi mahitaji ya wagonjwa katika hatua mbalimbali za mafunzo ya ukarabati. 5.Katika hali ya mazoezi tulivu, mtaalamu anaweza kuweka hadi miaka 60 ya shughuli za kila siku kama njia ya mafunzo ya mgonjwa.Mfumo humsukuma mgonjwa kufanya mazoezi ya kurejesha njia ya kurudia, endelevu na thabiti kulingana na mpangilio wa harakati na kupitia michezo na kutoa msisimko fulani wa hisi.
Bidhaa hii inaunganisha tathmini ya urekebishaji, mwingiliano wa eneo, mafunzo ya uigaji wa shughuli za maisha ya kila siku, mafunzo ya akili ya upangaji na ujifunzaji na mafunzo ya kibinafsi, na hutoa tathmini ya utendaji ya viungo vya juu na mafunzo kwa wagonjwa walio na upungufu wa nguvu ya misuli ya daraja la 0-5 ili kuharakisha mchakato wa kurejesha wagonjwa. FAIDA - 1.Inaweza kutambua harakati ya passiv na harakati hai ya viungo vya juu katika vipimo vingi.Wagonjwa wanaweza kufanya mazoezi bila nguvu ya misuli hata kidogo. 2. Mzunguko wa mwendo wa viungo vinavyohitajika ili kukamilisha mafunzo ya mchezo huonyeshwa na thamani ya tathmini ya mgonjwa. 3. Ukiwa na hali ya kujifunza kwa njia ya trajectory, jifunze na urekodi hadi dakika 3 za njia ya kudanganywa, endesha wagonjwa kutekeleza mafunzo ya tiba ya urejeshaji wa njia ya upotoshaji, na ufanye idadi kubwa ya mafunzo ya urekebishaji ya kurudia kwa wagonjwa wa mapema ili kuboresha ufanisi wa mafunzo. 4.Njia mbalimbali za mafunzo ili kukidhi mahitaji ya wagonjwa katika hatua mbalimbali za mafunzo ya ukarabati. 5.Katika hali ya mazoezi tulivu, mtaalamu anaweza kuweka hadi miaka 60 ya shughuli za kila siku kama njia ya mafunzo ya mgonjwa.Mfumo humsukuma mgonjwa kufanya mazoezi ya kurejesha njia ya kurudia, endelevu na thabiti kulingana na mpangilio wa harakati na kupitia michezo na kutoa msisimko fulani wa hisi.
 6.Katika hali ya mafunzo hai na tulivu, mtaalamu anaweza kurekebisha nguvu elekezi ya mkono wa roboti kwa kila kiungo cha miguu ya juu ya mgonjwa kulingana na hali ya mgonjwa.Wakati huo huo, ikiwa mgonjwa hawezi kushiriki kikamilifu katika mafunzo ndani ya sekunde 5, mfumo utabadilika moja kwa moja katika hali ya mafunzo ya passiv kuendesha mgonjwa kukamilisha mafunzo. 7.Katika hali ya mafunzo ya kazi, mgonjwa anaweza kuendesha mkono wa mitambo ili kusonga kwa mwelekeo wowote.Njia ya mafunzo inajumuisha mafunzo ya pamoja na mafunzo ya pamoja. 8.Weka njia zinazotumika kwa kawaida kwa mafunzo ya viungo vya juu na mienendo ya maisha ya kila siku ili wagonjwa wapate mafunzo kwa haraka. 9.Ulinzi mkali wa usalama, ufuatiliaji huru wa spasm, na pia kuwa na vifungo viwili vya kuacha dharura.Kando na hilo, mfumo wa programu hufuatilia kikomo cha mwendo mbalimbali wa mkono wa roboti kwa wakati halisi wakati wa shughuli, hulinda usalama wa wagonjwa kikamilifu.
6.Katika hali ya mafunzo hai na tulivu, mtaalamu anaweza kurekebisha nguvu elekezi ya mkono wa roboti kwa kila kiungo cha miguu ya juu ya mgonjwa kulingana na hali ya mgonjwa.Wakati huo huo, ikiwa mgonjwa hawezi kushiriki kikamilifu katika mafunzo ndani ya sekunde 5, mfumo utabadilika moja kwa moja katika hali ya mafunzo ya passiv kuendesha mgonjwa kukamilisha mafunzo. 7.Katika hali ya mafunzo ya kazi, mgonjwa anaweza kuendesha mkono wa mitambo ili kusonga kwa mwelekeo wowote.Njia ya mafunzo inajumuisha mafunzo ya pamoja na mafunzo ya pamoja. 8.Weka njia zinazotumika kwa kawaida kwa mafunzo ya viungo vya juu na mienendo ya maisha ya kila siku ili wagonjwa wapate mafunzo kwa haraka. 9.Ulinzi mkali wa usalama, ufuatiliaji huru wa spasm, na pia kuwa na vifungo viwili vya kuacha dharura.Kando na hilo, mfumo wa programu hufuatilia kikomo cha mwendo mbalimbali wa mkono wa roboti kwa wakati halisi wakati wa shughuli, hulinda usalama wa wagonjwa kikamilifu. 10.Kubadili kiotomatiki kati ya upande wa kushoto na kulia, na hivyo kupunguza utendakazi mzito.Wakati huo huo, usawa wa laser unaweza kusaidia mtaalamu kupata nafasi ya mazoezi inayofaa.11.Urejesho wa kiotomatiki, baada ya mafunzo kumalizika, bofya kitufe cha kurejesha kiotomatiki ili kurudi kwenye nafasi ya awali.Toleo la kwanza: https://www.yikangmedical.com/arm-rehabilitation-assessment-robotics.html
10.Kubadili kiotomatiki kati ya upande wa kushoto na kulia, na hivyo kupunguza utendakazi mzito.Wakati huo huo, usawa wa laser unaweza kusaidia mtaalamu kupata nafasi ya mazoezi inayofaa.11.Urejesho wa kiotomatiki, baada ya mafunzo kumalizika, bofya kitufe cha kurejesha kiotomatiki ili kurudi kwenye nafasi ya awali.Toleo la kwanza: https://www.yikangmedical.com/arm-rehabilitation-assessment-robotics.html Bidhaa mpya zaidi:Bedside ya Juu na ya Chini ya Miguu Inayotumika ya Mafunzo ya Baiskeli
Muda wa kutuma: Jan-30-2024 






 6.Katika hali ya mafunzo hai na tulivu, mtaalamu anaweza kurekebisha nguvu elekezi ya mkono wa roboti kwa kila kiungo cha miguu ya juu ya mgonjwa kulingana na hali ya mgonjwa.Wakati huo huo, ikiwa mgonjwa hawezi kushiriki kikamilifu katika mafunzo ndani ya sekunde 5, mfumo utabadilika moja kwa moja katika hali ya mafunzo ya passiv kuendesha mgonjwa kukamilisha mafunzo.
6.Katika hali ya mafunzo hai na tulivu, mtaalamu anaweza kurekebisha nguvu elekezi ya mkono wa roboti kwa kila kiungo cha miguu ya juu ya mgonjwa kulingana na hali ya mgonjwa.Wakati huo huo, ikiwa mgonjwa hawezi kushiriki kikamilifu katika mafunzo ndani ya sekunde 5, mfumo utabadilika moja kwa moja katika hali ya mafunzo ya passiv kuendesha mgonjwa kukamilisha mafunzo. 10.Kubadili kiotomatiki kati ya upande wa kushoto na kulia, na hivyo kupunguza utendakazi mzito.Wakati huo huo, usawa wa laser unaweza kusaidia mtaalamu kupata nafasi ya mazoezi inayofaa.11.Urejesho wa kiotomatiki, baada ya mafunzo kumalizika, bofya kitufe cha kurejesha kiotomatiki ili kurudi kwenye nafasi ya awali.Toleo la kwanza: https://www.yikangmedical.com/arm-rehabilitation-assessment-robotics.html
10.Kubadili kiotomatiki kati ya upande wa kushoto na kulia, na hivyo kupunguza utendakazi mzito.Wakati huo huo, usawa wa laser unaweza kusaidia mtaalamu kupata nafasi ya mazoezi inayofaa.11.Urejesho wa kiotomatiki, baada ya mafunzo kumalizika, bofya kitufe cha kurejesha kiotomatiki ili kurudi kwenye nafasi ya awali.Toleo la kwanza: https://www.yikangmedical.com/arm-rehabilitation-assessment-robotics.html