






TЗа останні 30 років розвиток реабілітаційної медицини йшов не по днях, а по годинах.Сучасна теорія реабілітації постійно вдосконалюється, постійно вдосконалюються технології реабілітаційної профілактики, оцінки та лікування.Відповідні концепції поступово проникають у різні клінічні дисципліни і навіть у повсякденне життя людей.Тенденція старіння населення в усьому світі, зокрема, ще більше збільшує попит на реабілітацію.Будучи важливою функцією участі та повноцінності людини в соціальному та повсякденному житті, функції руки також приділялося багато уваги її дисфункції та відповідній реабілітації.
Tкількість випадків дисфункції кисті з різних причин зростає, а ефективне відновлення функції кисті є основою для повернення пацієнтів у суспільство.Основні клінічно значущі захворювання для дисфункції рук поділяються на три основні категорії.Перший - захворювання, спричинені травмами, такі як звичайні переломи, пошкодження сухожиль, опіки та інші захворювання;друга - запалення суглобів, запалення сухожильної оболонки, міофасціальний больовий синдром та інші захворювання, викликані запаленням;є також деякі особливі захворювання, такі як вроджені дефекти верхніх кінцівок, порушення нервово-м'язового контролю, пошкодження нервів, викликане діабетом, первинна міопатія або атрофія м'язів.Тому відновлення функції руки є важливою частиною загальної реабілітації організму.
TПринцип реабілітації функції кисті полягає в тому, щоб максимально відновити рухову дисфункцію кисті або верхньої кінцівки, спричинену захворюваннями або травмами.Реабілітація кисті вимагає співпраці професійної лікувальної групи, що складається з лікарів-ортопедів, терапевтів, терапевтів, психотерапевтів та інженерів з ортопедичних пристроїв.Професійна лікувальна команда може надати пацієнтам різноманітну духовну, соціальну та професійну підтримку, яка є основою для ефективного одужання та соціальної реінтеграції.
SСтатистика показує, що за допомогою традиційного лікування лише близько 15% пацієнтів можуть відновити 50% функції рук після інсульту, і лише 3% пацієнтів можуть відновити понад 70% початкової функції руки.Вивчення більш ефективних методів реабілітаційного лікування для покращення реабілітації функції руки пацієнта стало гострою темою в галузі реабілітації.В даний час роботи для реабілітації функцій рук, які в основному зосереджені на тренуванні, орієнтованому на завдання, поступово стали незамінною технологією реабілітаційного лікування для реабілітації функцій рук, приносячи нові ідеї для реабілітації функцій рук після інсульту.
Робот для відновлення функції рукиявляє собою активно керовану механічну систему приводу, закріплену на руці людини.Він складається з 5 компонентів для пальців і опорної платформи для долоні.Компоненти пальців оснащені 4-стержневим механізмом з’єднання, і кожен компонент пальця приводиться в рух незалежним мініатюрним лінійним двигуном, який може керувати згинанням і розгинанням кожного пальця.Механічна рука кріпиться до руки за допомогою рукавички.Він може змушувати пальці рухатися синхронно, а пальці та робототехнічний екзоскелет взаємно сприймаються та інтерактивно контролюються в процесі реабілітаційної оцінки та навчання.По-перше, це може допомогти пацієнтам із повторюваними тренуваннями реабілітації пальців.Під час цього процесу екзоскелет руки може змушувати пальці виконувати рухи різного ступеня свободи за допомогою різних режимів керування для досягнення мети реабілітаційного навчання.Крім того, він також може збирати електричні сигнали здорової руки, коли вона рухається.Завдяки розпізнаванню шаблону руху електричної системи керування він може аналізувати жести здорової руки та керувати екзоскелетом, щоб допомогти ураженій руці виконати той самий рух, щоб усвідомити тренування синхронізації та симетрії рук.
IЗа методами лікування та наслідками реабілітаційний робот для рук суттєво відрізняється від традиційного реабілітаційного навчання.Традиційна реабілітаційна терапія в основному зосереджена на пасивних заняттях для уражених кінцівок у період млявого паралічу, що має такі недоліки, як низька активність пацієнтів і монотонний режим тренувань.Ручний робот-екзоскелет допомагає у тренуванні двосторонньої симетрії та реабілітаційному тренуванні з дзеркальної терапії.Завдяки інтеграції позитивного зворотного зв’язку зору, дотику та пропріоцепції, здатність активного моторного контролю пацієнта може бути посилена під час тренувального процесу.Перенесення активної участі пацієнта в реабілітації функції руки до млявого періоду, синхронізація рухових намірів, рухових дій і рухових відчуттів може бути реалізована під час лікування, а центр може бути повністю активований шляхом повторної стимуляції та позитивного зворотного зв’язку.Це ефективний метод реабілітації функції руки при геміплегії.Це комплексний метод реабілітаційного лікування може значно прискорити процес відновлення функції руки у пацієнтів, які перенесли інсульт, і має помітне значення переваги у відновленні функції кисті після інсульту.
TРоботна система реабілітації функцій рук розроблена на основі теорії реабілітаційної медицини та має багато характеристик у своїх рецептах реабілітаційного лікування.У процесі лікування система моделює закони руху руки в реальному часі.Завдяки незалежному датчику приводу кожного пальця він може реалізувати різноманітні тренування для різних цілей, наприклад одним пальцем, декількома пальцями, повним пальцем, зап’ястям, пальцем і зап’ястям тощо, і таким чином точний контроль функцій руки може бути реалізованим.Крім того, проводиться точна оцінка ЕМГ-сигналу для пацієнтів з різною силою м'язів, щоб підібрати цілеспрямований метод тренування для пацієнта.Дані оцінювання та навчальні дані можна записувати для зберігання та аналізу, а систему можна підключити до Інтернету для медичного підключення 5G у реальному часі.Система також оснащена різними режимами тренування, такими як пасивне тренування, активно-пасивне тренування, активне тренування, і відповідне тренування можна вибрати відповідно до різної сили м’язів пацієнтів.


Оригінальна оцінка ЕМГ великого пальця та оцінка ЕМГ чотирьох пальців є одним із способів отримати сигнал біологічної статури пацієнта, проаналізувати наміри руху, представлені сигналом статури, а потім завершити контроль реабілітаційної руки екзоскелета для реалізації реабілітаційного тренування.
Потенційні зміни, спричинені скороченнями м’язів, виявляються на поверхні тіла, і після посилення сигналу та фільтрації для усунення шумового сигналу цифрові сигнали перетворюються, подаються та записуються в комп’ютер.
Сигнал поверхневої ЕМГ має хорошу продуктивність у реальному часі, сильну біонічну природу, зручне керування та легке керування, що означає, що він може судити про режим руху кінцівок відповідно до поверхневої ЕМГ тіла людини.
AЗгідно з багатьма клінічними експериментами, цей продукт в основному застосовується для реабілітаційного лікування дисфункції рук, спричиненої пошкодженням нервової системи, таким як інсульт (інфаркт мозку, крововилив у мозок).Чим раніше пацієнт починає тренування за системою A5, тим кращий ефект функціонального відновлення можна отримати.Деякі результати дослідження показані на малюнку нижче.
(малюнок 1: клінічне дослідження під назвоюВплив ЕМГ-тригерованої роботизованої реабілітації функції руки на руку у пацієнтів з раннім інсультом)
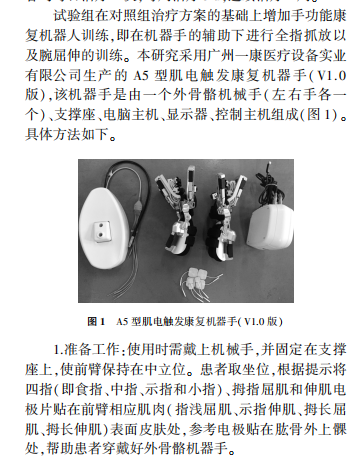
(малюнок 2: Yeecon Hand Rehabilitation System A5 використовувалася для клінічного дослідження)
Результати цих досліджень показують, що реабілітаційна роботизована рука, що запускається за допомогою електроміографії, може покращити моторику рук пацієнтів, які перенесли інсульт.Має певне довідкове значення для реабілітації функції кисті у хворих на ранніх стадіях інсульту.
профіль компанії
ГуанчжоуYikang MedicalEquipment Industrial Co., Ltd. була заснована в 2000 році. Це високотехнологічне підприємство та постачальник високоякісних інтелектуальних реабілітаційних медичних послуг, що об’єднує дослідження та розробки, виробництво, продаж і післяпродажне обслуговування.З місією «допомогти пацієнтам досягти щасливого життя» та баченням «інтелект полегшує реабілітацію» Yikang Medical сповнена рішучості стати лідером у галузі інтелектуальної реабілітації в Китаї та зробити внесок у індустрію реабілітації на батьківщині.
З моменту заснування в 2000 році Yikang Medical пережила 20 років злетів і падінь.У 2006 році було створено aНДДКРцентр, який зосереджується на дослідженні та розробці високоякісних реабілітаційних продуктів.У 2008 році Yikang Medical була першою компанією, яка запропонувала концепцію інтелектуальної реабілітації в Китаї.Це нова ера для розвитку вітчизняних інтелектуальних реабілітаційних продуктів, і в тому ж році він запустив першого інтелектуального реабілітаційного робота A1 у Китаї.З тих пір він запустив низкуAСерія інтелектуальних реабілітаційних продуктів.У 2013 році Yikang Medical було визнано національним високотехнологічним підприємством і будівельним підрозділом національної демонстраційної бази з виробництва обладнання для діагностики та лікування традиційної китайської медицини.У 2018 році він був визнаний одним із старших членів Китайського товариства реабілітаційної медицини та спонсором CARM Rehabilitation Robot Alliance.У 2019 році Іканг отримав другу премію Національної премії за науково-технічний прогрес, взяв участь у трьох ключових національних науково-дослідницьких проектах і брав участь у складанні обов’язкового навчального плану 13-го п’ятирічного плану.
10 січня 2020 р. Голова Китайської Народної Республіки,Містер.Сі Цзіньпін вручив нагороди Yikang Medical, Фуцзяньському університету традиційної китайської медицини, Гонконзькому політехнічному університету та іншим підрозділам за проект ключової технології та клінічного застосування інтегрованої традиційної китайської та західної медицини для реабілітації постінсультних дисфункцій у Великому залі Люди.
Yikang Medical залишається вірним початковому прагненню, завжди пам’ятає про свою відповідальність як провідного підприємства в інтелектуальній реабілітації та бере участь у трьох ключових національних науково-дослідних проектах у рамках спеціального проекту «Проактивна реакція на технології здоров’я та старіння», які включають тренінги реабілітації вокалізації та мовної дисфункції. система, система реабілітації рухової дисфункції кінцівок і робот із травмою спинного мозку людини.

Детальніше:
Необхідність ранньої реабілітації кисті
Що таке реабілітаційний робот?
Система навчання та оцінки функцій рук
Час публікації: 21 червня 2022 р