







Уводзіны
Робат для рэабілітацыі верхніх канечнасцяў выкарыстоўвае камп'ютэрную віртуальную тэхналогію ў спалучэнні з тэорыяй рэабілітацыйнай медыцыны для мадэлявання правілаў руху верхніх канечнасцяў чалавека ў рэжыме рэальнага часу, і пацыенты могуць прайсці навучанне па рэабілітацыі некалькіх суставаў або аднаго сустава ў камп'ютэрным віртуальным асяроддзі.
Сістэма таксама мае трэніроўку па зніжэнні вагі верхняй часткі цела, інтэлектуальную зваротную сувязь, шматмерную касмічную трэніроўку і магутную сістэму ацэнкі.Ён у асноўным падыходзіць для пацыентаў з дысфункцыяй верхніх канечнасцяў, выкліканых інсультам, парушэннямі мазгавога кровазвароту, цяжкай чэрапна-мазгавой траўмай або іншымі неўралагічнымі захворваннямі, або для пацыентаў, якія аднавілі функцыю верхніх канечнасцяў пасля аперацыі.

Тэрапеўтычны эфект
Садзейнічаць фарміраванню ізаляванага руху
Стымуляваць рэшткавую мышачную сілу
Павышэнне цягавітасці цягліц
Аднавіць каардынацыю суставаў
Аднавіць гнуткасць суставаў
Умацуйце рухальны кантроль верхняй часткі цела
Моцная сувязь з ADL
Аднаўленне функцыі верхняй канечнасці
Асаблівасці
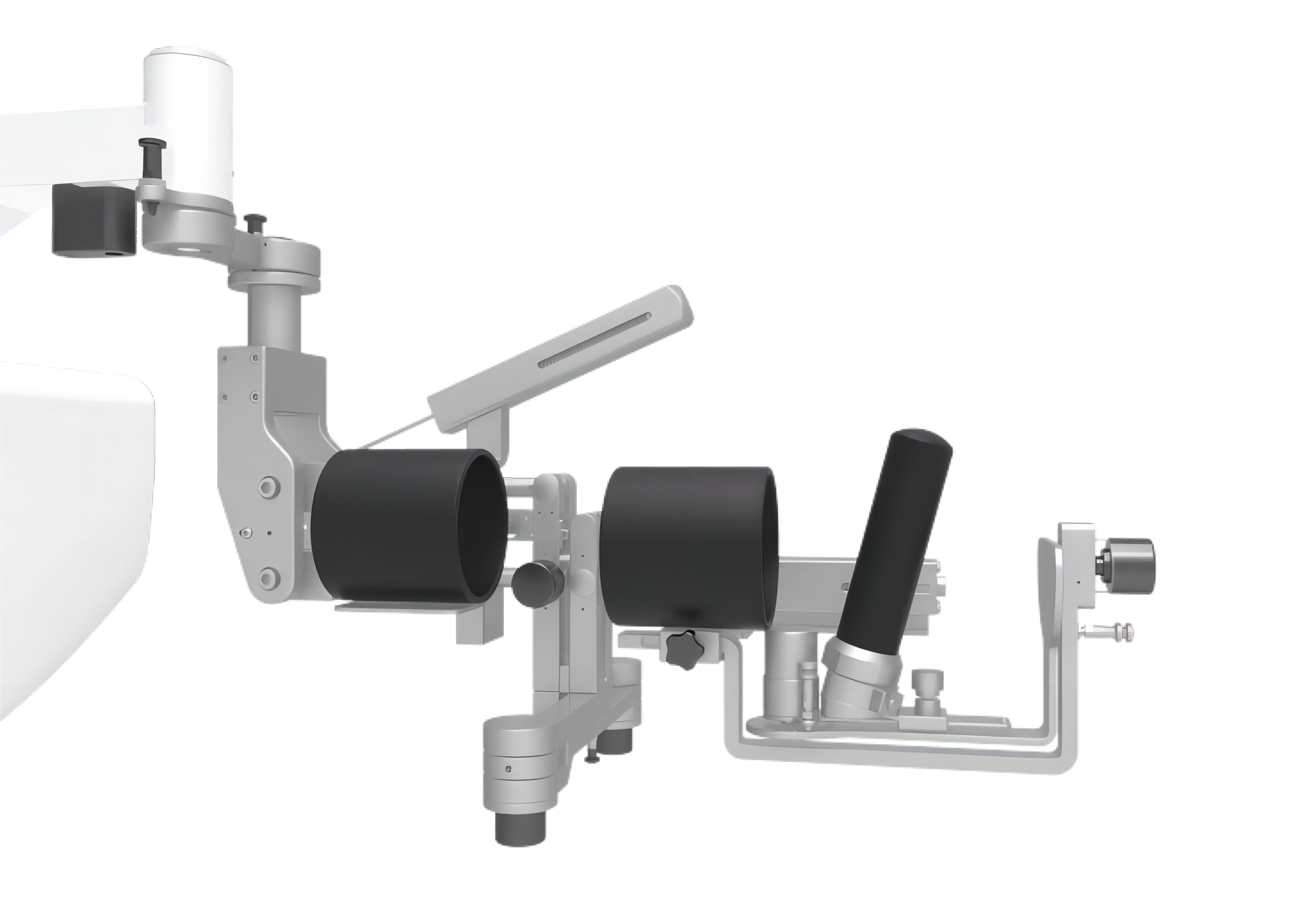
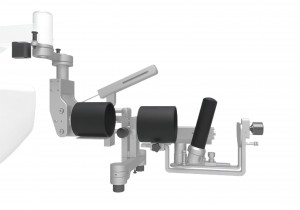
Функцыя 1: структура, абгорнутая экзашкілетам
абарона сумесных апоры
садзейнічаць руху аддзялення
Палепшаны кантроль аднаго сустава
Асобна рэгулюецца супраціў перадплечча і плеча
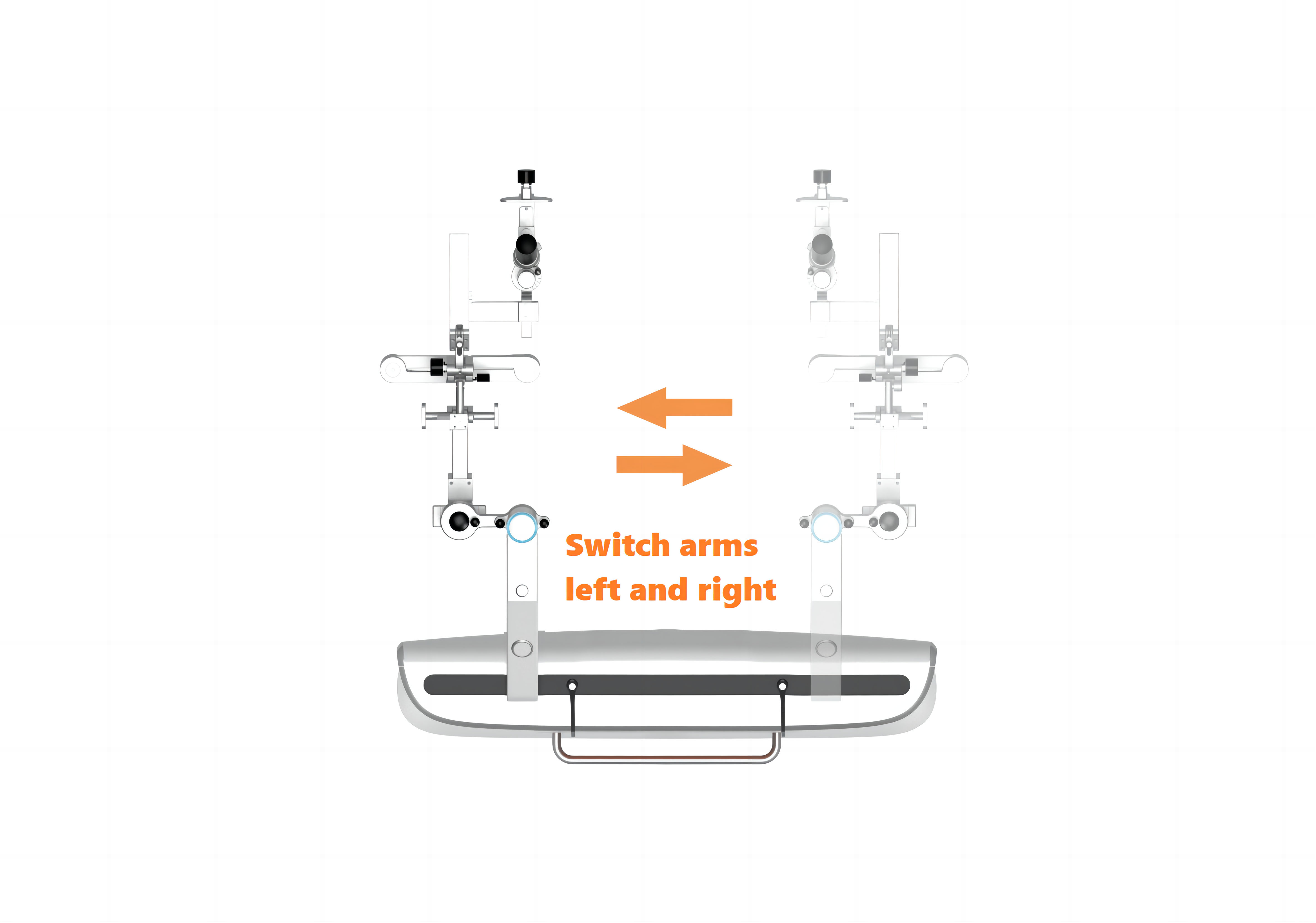
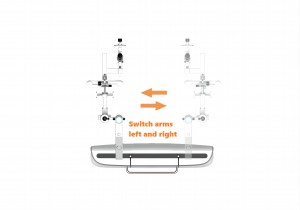
Характарыстыка 2: інтэграваная канструкцыя змены рукі
Прасцей змяніць руку
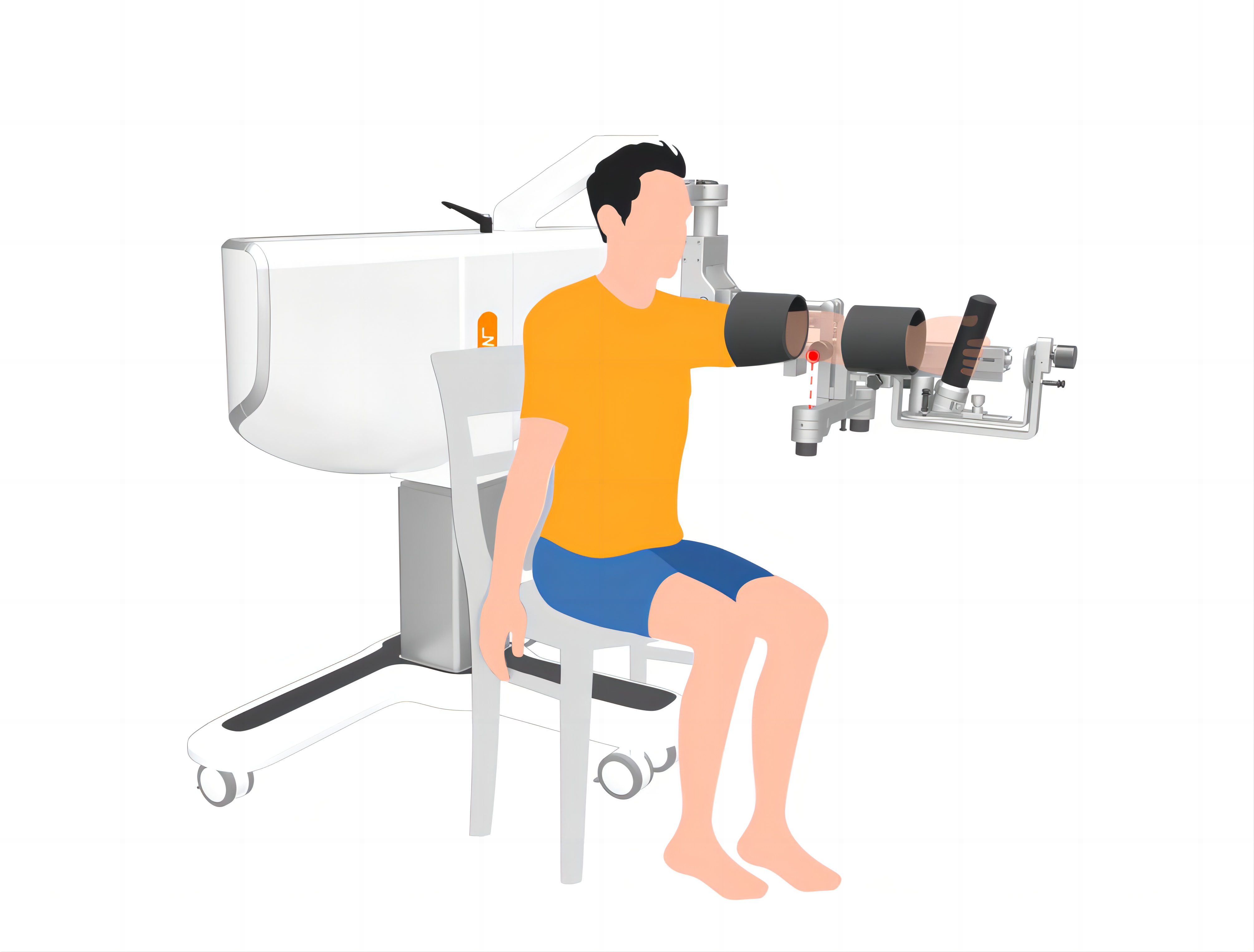
Функцыя 3: Убудаваны лазерны лакатар
Дакладнае размяшчэнне сустава для забеспячэння бяспечнага і эфектыўнага лячэння

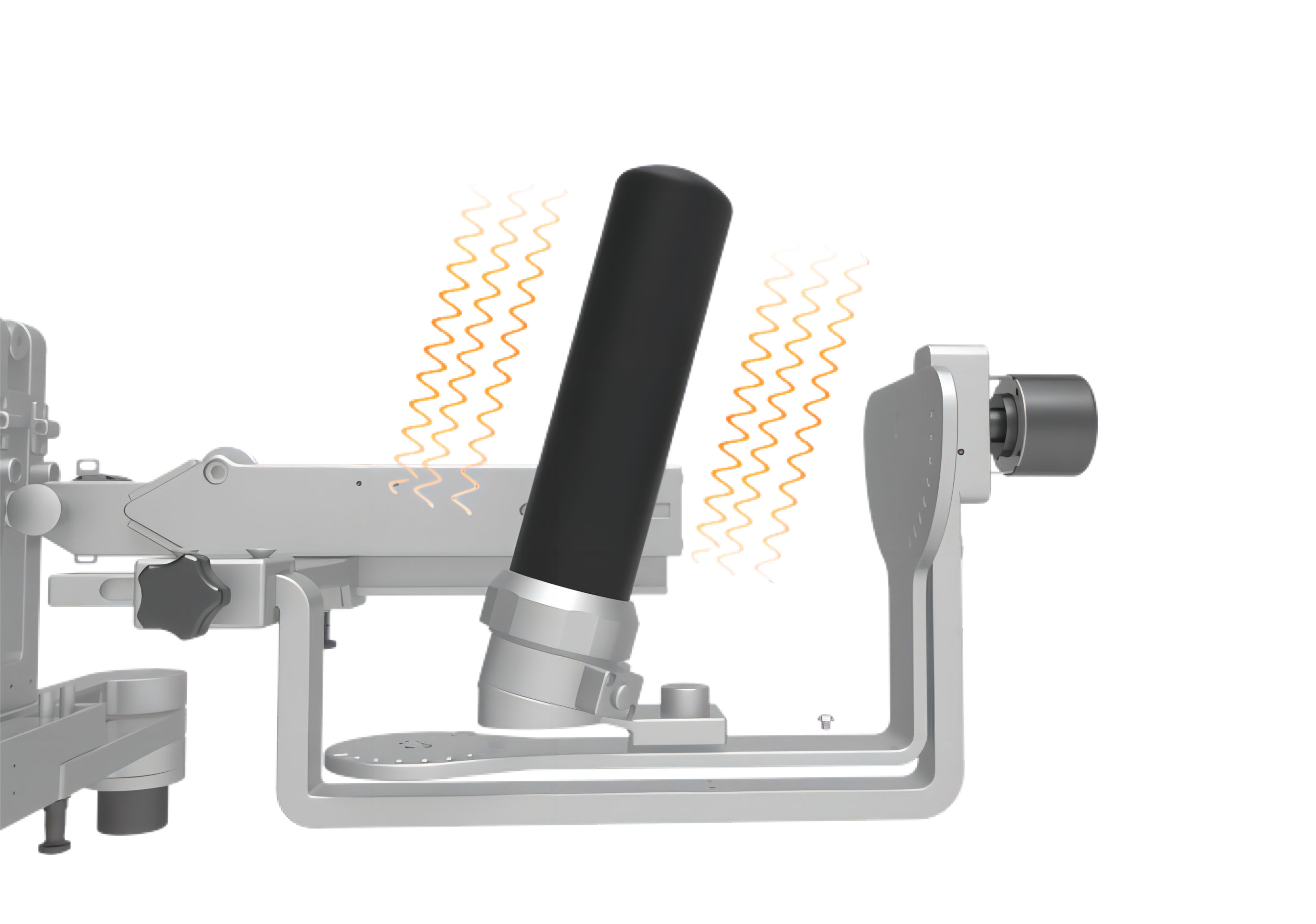
Функцыя 4: захоп рукой + стымуляцыя вібрацыйнай зваротнай сувязі
Зваротная сувязь у рэжыме рэальнага часу аб сіле счаплення
Ацаніце вібрацыйныя абвесткі падчас навучання

Асаблівасць 5: Дакладная ацэнка аднаго сустава
Функцыя 6: 29 узаемадзеянняў сцэн
У цяперашні час існуе 29 відаў непаўторных навучальных гульнявых праграм, якія пастаянна абнаўляюцца і дапаўняюцца
Функцыя 7: Аналіз дадзеных
Гістаграма, адлюстраванне зводных даных лінейнага графіка
Параўнанне любых двух ацэначных вынікаў навучання





